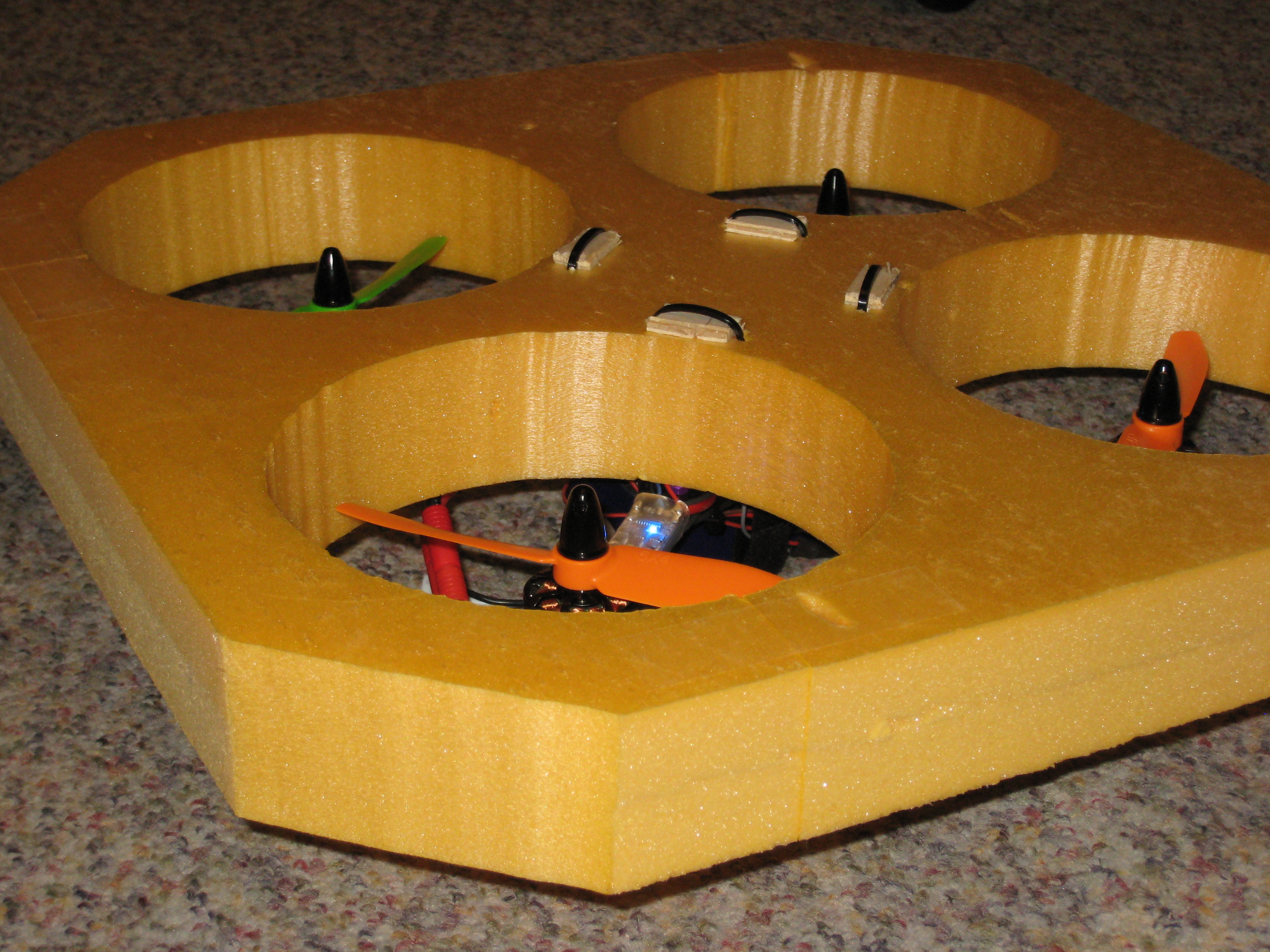
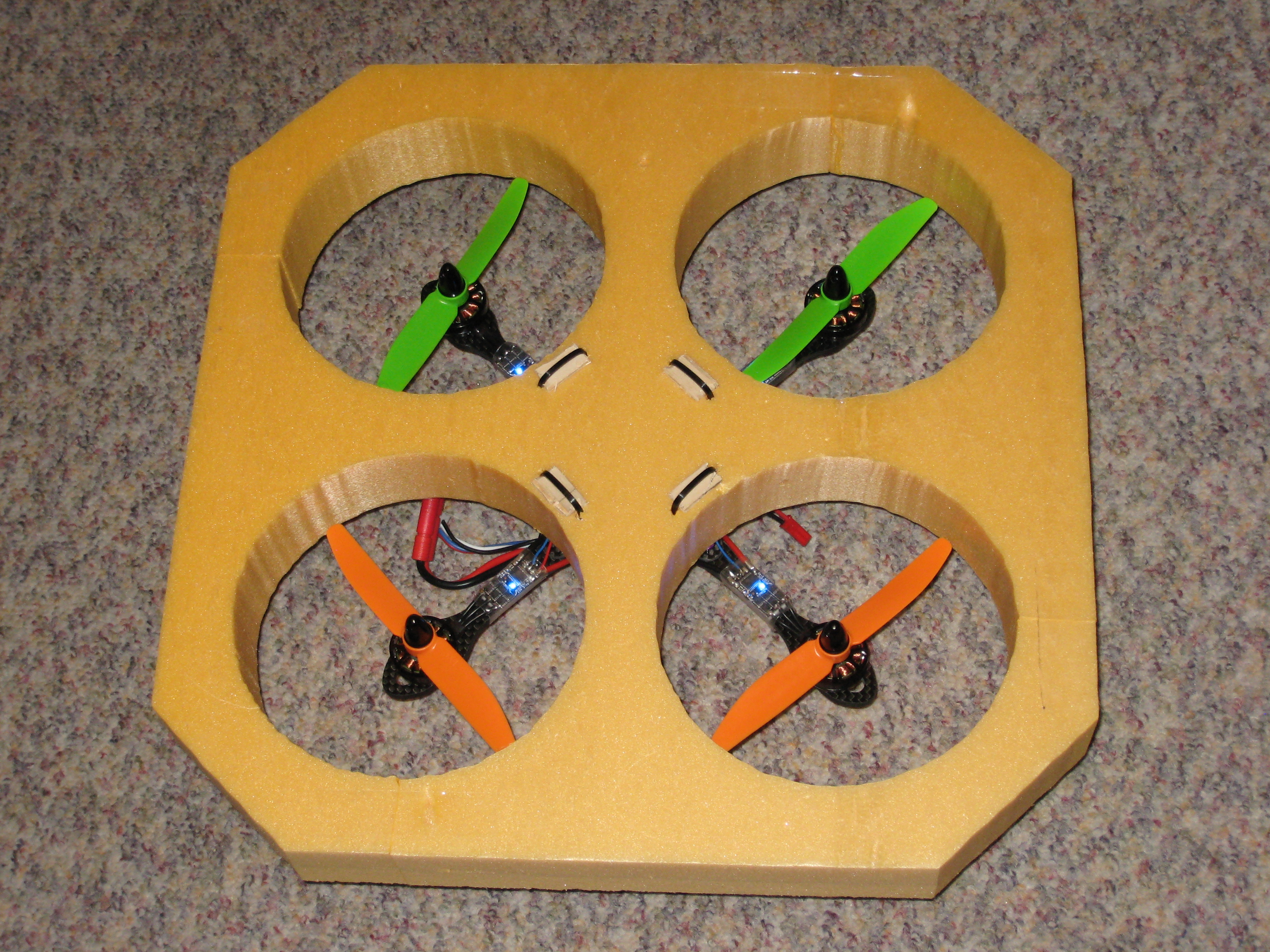
Der WarpQuad als „Annoying UFO“ – leider fast unfliegbar (dreht ab und zu spontan um 90°) – und macht einen Höllenlärm! Da muss ein Turbinenexperte ran (der sagt dann wohl der Spalt Propeller/Rand muss viel kleiner sein und Einlauflippe dran, etc). Für den Rahmen musste ich 5×4 Propeller benutzen, sonst sind die Stege zu schmal. Und ich grub meinen Heißdrahtschneider wieder aus! Der Quad ist dann mit Kabelbindern befestigt. Die Mitte fräste ich mit dem Proxxon frei. Da passt der WarpQuad saugend rein.
Im Hornbach 6,70€, das war mir der Spaß schon wert und ich hab eine 1265x615x40 Platte XPS im Keller liegen…
Das Anstoßen klappt dafür, der Quad bleibt dann an der Türe stehen und ich muss ihn da wieder wegsteuern.