diff version Betaflight / OMNIBUSF4 (OBF4) 3.5.0 Aug 14 2018 / 03:49:19 (1d710afd7) MSP API: 1.40 board_name OMNIBUSF4 manufacturer_id AIRB name name XJB145 resources mixer servo servo mix feature feature -RX_PARALLEL_PWM feature RX_SERIAL feature LED_STRIP beeper beeper -ON_USB beacon map map TAER1234 serial serial 0 64 115200 57600 0 115200 serial 2 8192 115200 57600 0 115200 led led 0 7,8::CT:2 led 1 8,8::CTW:2 color mode_color aux aux 0 0 0 1300 2100 0 0 aux 1 1 1 1700 2100 0 0 aux 2 13 2 1300 1700 0 0 aux 3 28 0 1700 2100 0 0 aux 4 35 2 1700 2100 0 0 adjrange rxrange vtx rxfail master set gyro_lowpass_hz = 120 set dyn_notch_quality = 15 set dyn_notch_width_percent = 30 set acc_calibration = -83,-11,-196 set mag_hardware = NONE set baro_hardware = NONE set min_check = 1010 set max_check = 1990 set rssi_channel = 16 set rc_smoothing_type = FILTER set fpv_mix_degrees = 30 set serialrx_provider = SBUS set dshot_idle_value = 370 set motor_pwm_protocol = DSHOT600 set current_meter = NONE set small_angle = 180 set pid_process_denom = 2 set osd_tim1 = 2561 set osd_vbat_pos = 2465 set osd_rssi_pos = 2505 set osd_tim_1_pos = 2518 set osd_tim_2_pos = 33 set osd_flymode_pos = 416 set osd_throttle_pos = 2511 set osd_vtx_channel_pos = 377 set osd_ah_pos = 200 set osd_current_pos = 385 set osd_mah_drawn_pos = 353 set osd_craft_name_pos = 2081 set osd_gps_speed_pos = 218 set osd_gps_lon_pos = 82 set osd_gps_lat_pos = 65 set osd_gps_sats_pos = 51 set osd_home_dir_pos = 302 set osd_home_dist_pos = 303 set osd_compass_bar_pos = 266 set osd_altitude_pos = 247 set osd_pid_roll_pos = 423 set osd_pid_pitch_pos = 455 set osd_pid_yaw_pos = 487 set osd_debug_pos = 1 set osd_power_pos = 321 set osd_pidrate_profile_pos = 345 set osd_warnings_pos = 2409 set osd_avg_cell_voltage_pos = 2497 set osd_pit_ang_pos = 257 set osd_rol_ang_pos = 289 set osd_battery_usage_pos = 392 set osd_disarmed_pos = 138 set osd_nheading_pos = 311 set osd_nvario_pos = 279 set osd_esc_tmp_pos = 82 set osd_esc_rpm_pos = 83 set osd_stat_max_curr = OFF set osd_stat_used_mah = OFF set debug_mode = FFT_FREQ set vtx_channel = 7 set vtx_freq = 5860 profile profile 0 set dterm_notch_cutoff = 0 set iterm_rotation = OFF set smart_feedforward = ON set iterm_relax = RP set p_pitch = 57 set i_pitch = 40 set d_pitch = 24 set p_roll = 55 set i_roll = 40 set d_roll = 24 set i_yaw = 60 set abs_control_gain = 5 rateprofile rateprofile 0 set thr_mid = 33 set thr_expo = 10 set roll_srate = 80 set pitch_srate = 80 set tpa_rate = 20 set tpa_breakpoint = 1050
Archiv des Monats: Oktober 2019
Kleine Spaßmaschine sub-250g mit INAV – Phenix 60 von Happymodel
Ein echter Geheimtipp, für alle die was Sub-250g-Fliegbares bauen wollen.
Der Phenix 60 von Happymodel bei Banggood!
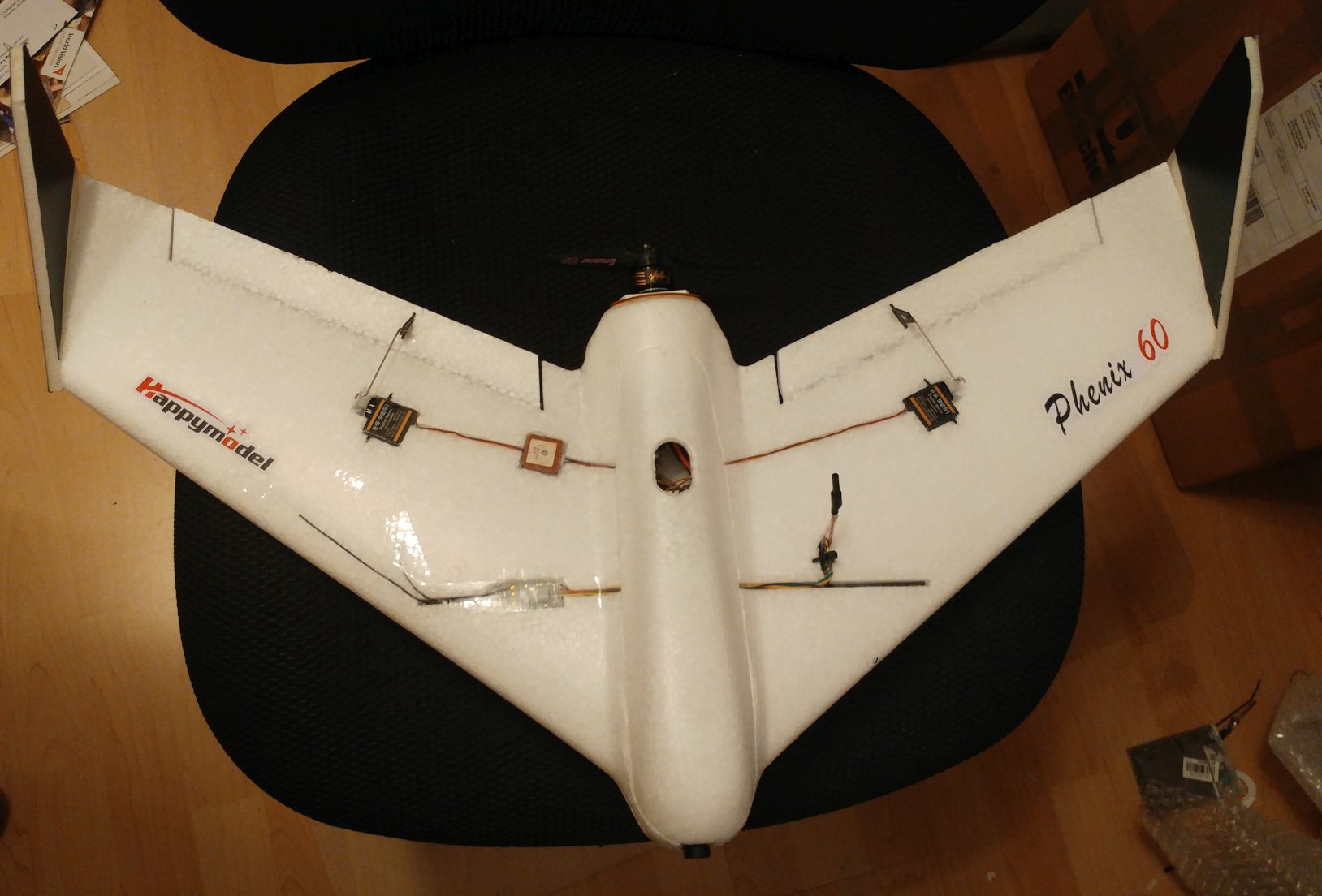
Vorteile: Preiswert! Echtes in der Form geschäumtes EPO, stabil und glatt. Eingeklebter Carbonholm für bessere Stabilität. Die Winglets sind abnehmbar (Schrauben), davon habe ich keinen Gebrauch gemacht, ich hab die Holzränder entfernt und geklebt. Der Rumpf ist windschnittig, hat aber trotzdem viel Stauraum. Der Deckel ist mit drei starken Magneten befestigt und gibt den ganzen Rumpfinnenraum frei. Das Modell fliegt sehr effizient – mit 1,5A mit ca. 40km/h. Mit dem F30 2800kv an 3s und 4,7×4,7 Graupner Speed-Prop habe ich auch schon 140km/h bei 15A erreicht. Start unkritisch, viel besser als WingWing oder Scorpy.
Nachteile: Kleine leichte Modelle sind natürlich windempfindlicher als schwere. Der Motor kann nur umständlich befestigt werden. Außerdem hat der Motor einen zu geringen Sturz, dafür deutlich Seitenzug (der Prop sollte daher von hinten betrachtet im Uhrzeigersinn drehen, das ist auch nicht schlimm). Wenn man einen schweren Motor verbaut, wird der Schwerpunkt problematisch. Es macht auch keinen Sinn, das Modell auf Speed zu motorisieren, dazu ist es zu labil.
Im Kit sind alle Kleinteile schon dabei. Man braucht daher nur noch die Elektronik. Fett=bei mir verbaut.
- Motor z.B. Mamba 4000kv oder HGLRC Flame 3600kv (2-3s), mit Prop 3052/4040/4747, alternativ auch den T-Motor F30 2800kv oder BrotherHobby Avenger 2800kv (diese dann mit 4,7×4,7-5×5 Prop an 3s).
- ESC mit BEC, z.B. Sunrise 11A (wenn man bei 3s bleibt). Ansonsten beliebig größere und extra BEC für die Servos. Ich habe einen kleinen BLHeli32 30A verbaut.
- Servos, z.B. EMAX ES9051 oder die bewährten HXT500.
- Empfänger mit SBUS, z.B. FrSky XM+. Oder Crossfire nano, wer mag und gerne weiter weg will.
- Flightcontrol, z.B. Omnibus F4 Pro.
- GPS z.B. BN220. GPS-Versorgung an 3,3V, dort ist die Spannung sauberer.
- Videosender, z.B. Unify Nano 32. Es gehen natürlich auch preiswertere wie der VTX03 oder Eachine nano VTX. Rush tank ultimate bzw. nano sind auch gut.
- Kamera, z.B. RunCam nano racer. Fast so gut wie die Eagle – oder man nimmt die micro Eagle. Mittlerweile empfehle ich auch die Runcam Ant oder Baby Ratel v1/v2.
- Bei mir ist eine Caddx Vista Nebula nano verbaut.
- Beeper, entweder Standard oder Batterie-gestützt.
- Akkus z.B. Turnigy Nano Tech 3s 950 (die sind schön leicht). Tattu 3s 850 gehen auch.
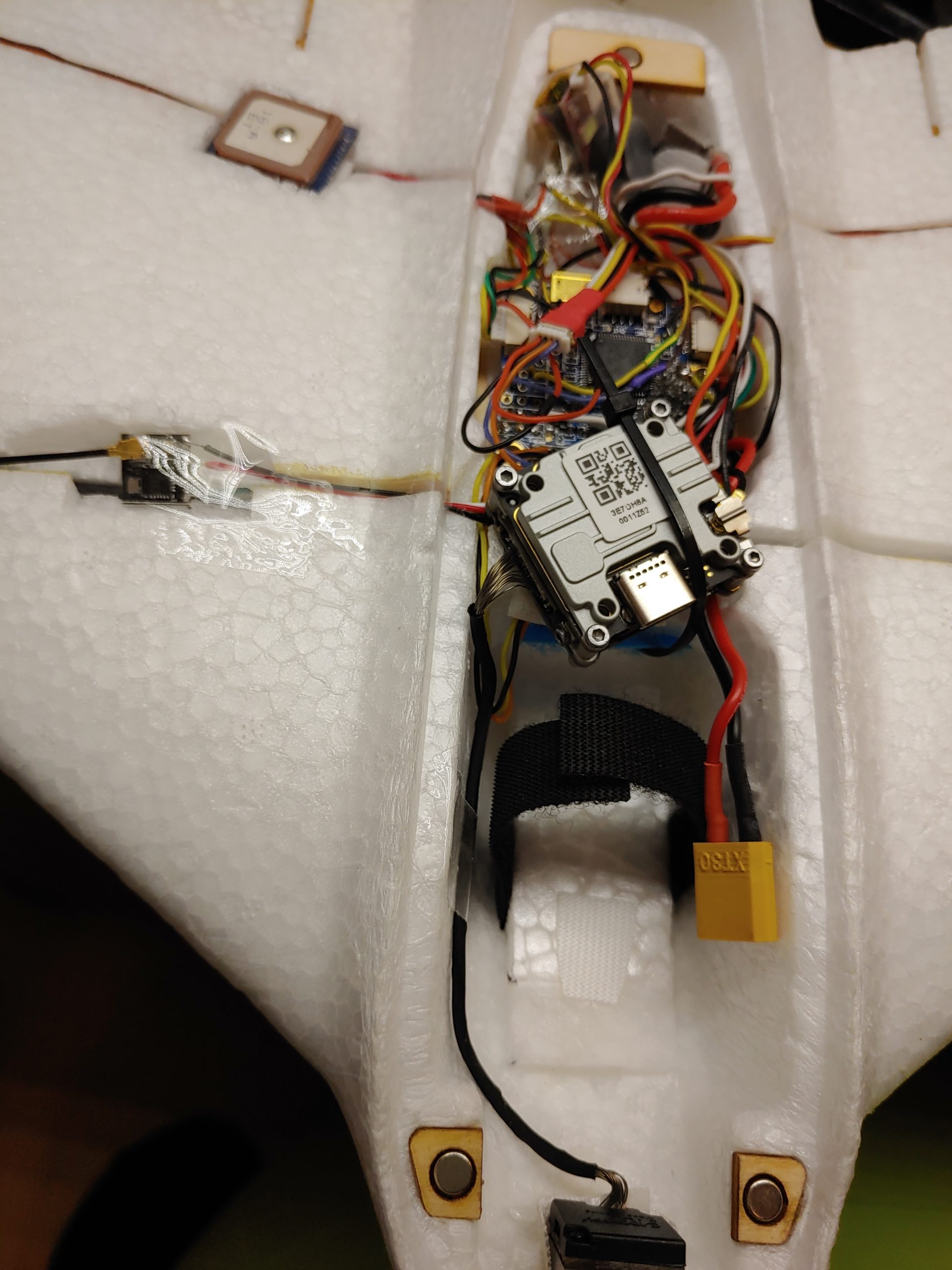
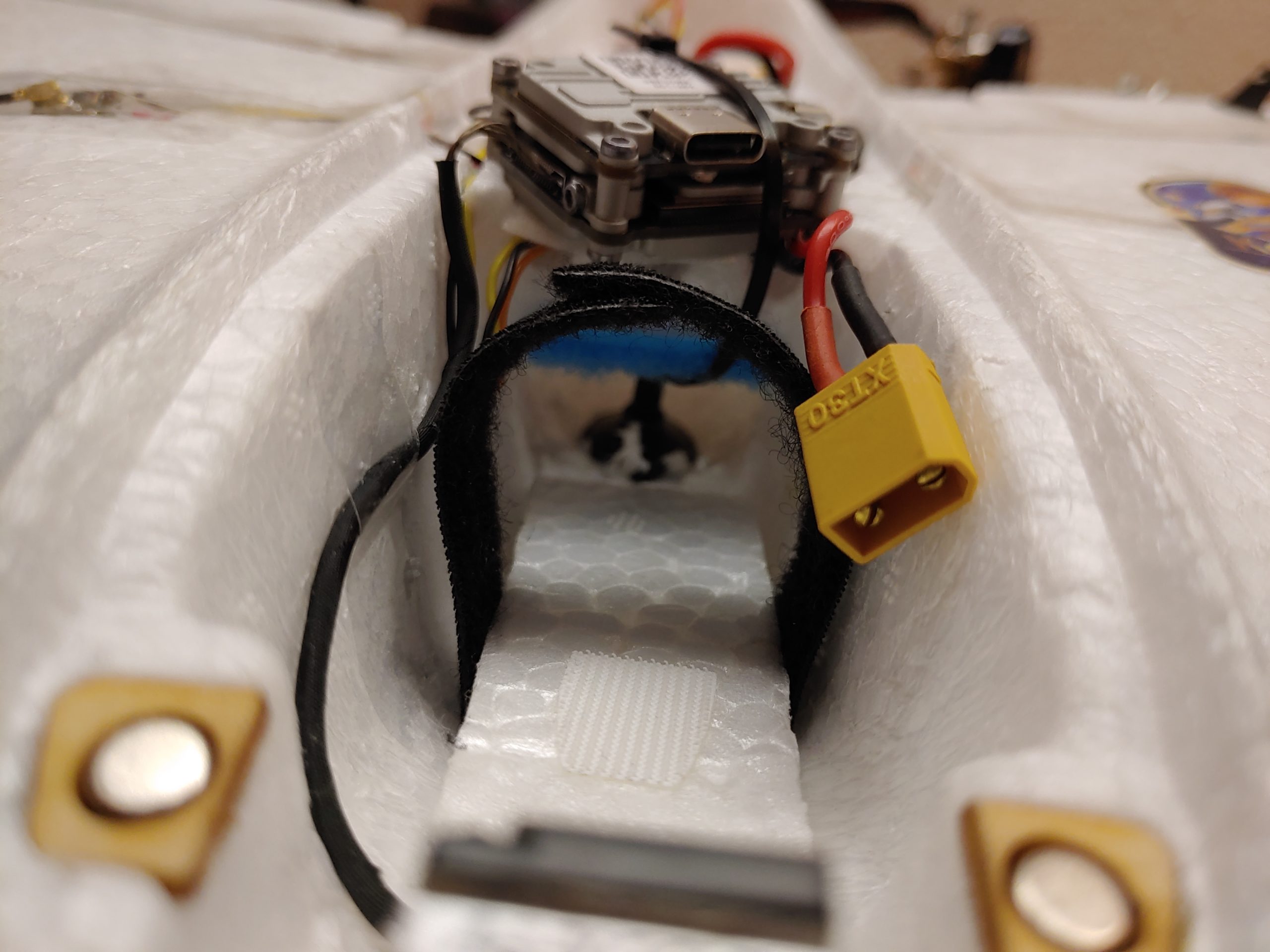
Servos zentrieren, Arme anschrauben, die Gestänge einhängen, nach Anleitung leicht nach oben gestellt. Dann einkleben und wer mag direkt verlöten. Die Kamera kommt ganz nach vorne, den VTX habe ich links auf die Fläche senkrecht im Luftstrom zur Kühlung, der XM+/Crossfire nano ist auf der anderen Seite. Die Vista ist mittig auf dem Holm, mit Klett und Kabelbinder fixiert und die Antenne nach unten in den Rumpf in einem passgenauen Loch. In den Deckel habe ich einen großen Kühlungsschlitz geschnitten. Das GPS habe ich nach rechts hinten auf den Flügel. Die FC kommt auf das bereits angebaute Brettchen. Der ESC kommt in den Rumpf hinten, Kabel durch den Spalt nach hinten raus, direkt mit dem Motor verlötet. Der Akku geht direkt auf die FC, diese versorgt auch gleich die FPV-Komponenten mit 5V (Achtung: Kleiner Umbau – der onboard-Filter an der Diodenanode wird nicht auf 5V gebrückt, sondern mit einem Draht mit dem Kondensator des 5V-Wandlers auf der gleichen Seite verlötet). Der RX und GPS werden von ihren Ports aus versorgt (ca. 4,4V). Das ist vielleicht nur bei dieser FC so, dass es keine echten 5V gibt. Den Umbau also nur machen, wenn keine vollen 5V erreicht werden.
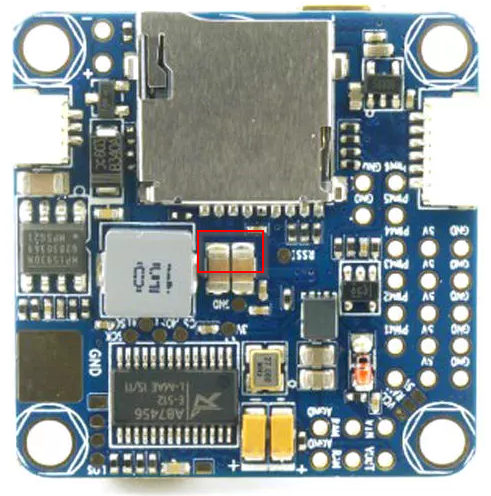
Die Spannung bricht bei Anschluss eines VTX hier auf 3,7V ein. Die „5V“-Anschlüsse für Receiver und GPS sind dann sogar auf 3V! Daher: Dieser Umbau ist nicht zu empfehlen – VTX muss extra versorgt werden! Die Omnibus hat leider eine sehr schlechte 5V-Schiene.
„RAM“ ist auf Vbatt durch den Filter (nicht die Mini-Lötbrücke, sondern direkt von Mot anfädeln!), da hängt die Vista bzw. der VTX (5V-only brauchen da noch einen BEC).
Der Vorteil ist, dass die FPV-Komponenten durch das Onboard-Filter vor Störungen geschützt sind. Die Servos kriegen immer ein extra BEC. GPS ist empfindlich, das sollte nicht auf der Omnibus-5V laufen. Die 3,3V sind ok.
- BN220 GPS an 3,3V – UART6
- Happymodel ELRS an 5V – UART1
- Vista Nebula an gefilterte VBAT – UART3; Antenne nach unten in ein Loch im Rumpf.
- 2x EMAX ES9051 Servos haben eigenes Mini-BEC 5,5V – Channel 3 und 4
- Vifly Finder LiPo-Buzzer an 5V, Buzzerpin und GND
- Spedix GS30 BLHeli32 ESC an Channel 1
- T-Motor F30-2800kv
- Graupner CamSpeed 4,7×4,7
- T-Motor F30-2800kv
Auf das Dekor habe ich weitgehend verzichtet.

Für den Motor habe ich folgende Lösung gefunden (ein 3d-Drucker vorausgesetzt):

Mit versenkten Schrauben mit Kegelkopf. Passend für 12 und 16mm Löcher. Der Mount dürfte sogar noch 1° mehr haben, ich hab einen dünnen Karton noch eingeklemmt.
Auf der Unterseite habe ich noch eine Depron-Finne zum Propellerschutz angeklebt.
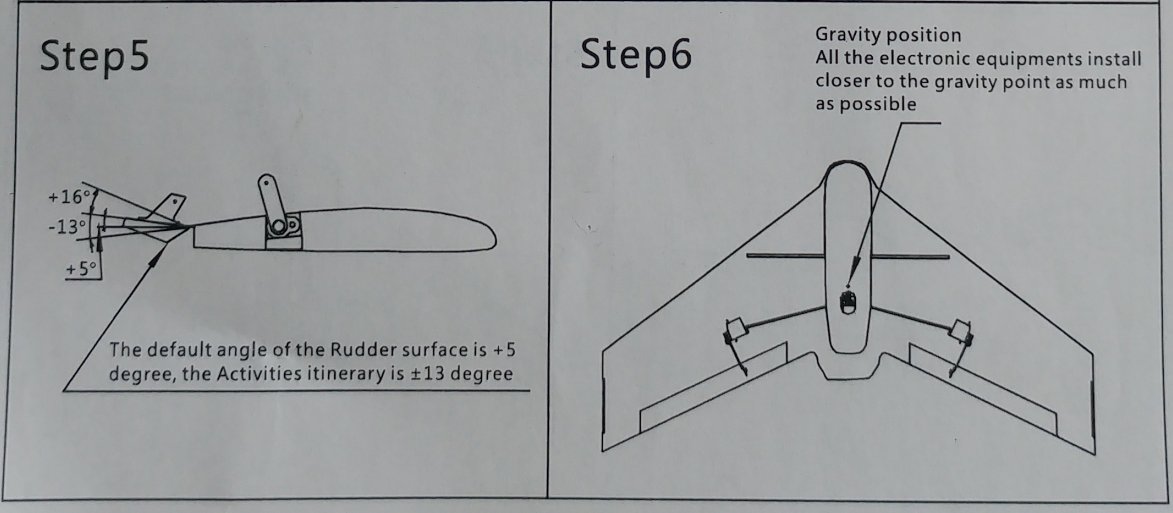
Schwerpunkt und Ausschläge nach Anleitung einstellen!
Zum Setup: INAV laden, Vorlage WingWing Z84 anwenden, dann Servos überprüfen und einstellen. Für weitere Einstellungen empfehle ich diesen Guide.
UART1: CRSF (ExpressLRS @150Hz mit 1/8 Telemetrie)
UART3: DJI
UART6: GPS
Mein aktuelles Setup (diff):
# version # INAV/OMNIBUSF4PRO_LEDSTRIPM5 2.6.1 Feb 25 2021 / 11:02:30 (64249b1a) # GCC-9.2.1 20191025 (release) [ARM/arm-9-branch revision 277599] # start the command batch batch start # resources # mixer mmix reset mmix 0 1.000 0.000 0.000 0.000 mmix 1 1.000 0.000 0.000 0.000 # servo mix smix reset smix 0 3 0 50 0 -1 smix 1 3 1 50 0 -1 smix 2 4 0 -50 0 -1 smix 3 4 1 50 0 -1 # servo servo 3 1100 1900 1485 -96 servo 4 1225 2025 1625 96 # safehome # logic # gvar # feature feature -BLACKBOX feature MOTOR_STOP feature GPS feature TELEMETRY feature CURRENT_METER feature PWM_OUTPUT_ENABLE # beeper # map map TAER # serial serial 0 64 115200 115200 0 115200 serial 2 2097152 115200 115200 0 115200 serial 5 2 115200 115200 0 115200 # aux aux 0 0 0 1300 2100 aux 1 1 2 1700 2100 aux 2 3 1 1300 2100 aux 3 3 2 1700 2100 aux 4 11 1 1300 1700 aux 5 10 1 1700 2100 aux 6 12 0 1300 1700 aux 7 21 3 1700 2100 aux 8 13 3 1700 2100 # master set gyro_hardware_lpf = 256HZ set gyro_lpf_hz = 35 set acc_hardware = MPU6000 set acczero_x = 69 set acczero_y = -17 set acczero_z = -402 set accgain_x = 4075 set accgain_y = 4072 set accgain_z = 3995 set mag_hardware = NONE set baro_hardware = BMP280 set pitot_hardware = NONE set receiver_type = SERIAL set serialrx_provider = CRSF set motor_pwm_rate = 1000 set failsafe_procedure = RTH set failsafe_mission = OFF set align_board_roll = -20 set align_board_yaw = 900 set current_meter_scale = 235 set platform_type = AIRPLANE set model_preview_type = 8 set servo_pwm_rate = 100 set small_angle = 180 set applied_defaults = 3 set gps_sbas_mode = EGNOS set gps_ublox_use_galileo = ON set deadband = 2 set yaw_deadband = 2 set nav_extra_arming_safety = OFF set nav_wp_radius = 3000 set nav_min_rth_distance = 1000 set nav_rth_allow_landing = FS_ONLY set nav_rth_altitude = 6000 set nav_fw_cruise_thr = 1500 set nav_fw_bank_angle = 36 set nav_fw_climb_angle = 22 set nav_fw_control_smoothness = 2 set i2c_speed = 800KHZ set name = :WDTSE # profile profile 1 set fw_p_pitch = 9 set fw_i_pitch = 15 set fw_ff_pitch = 30 set fw_p_roll = 9 set fw_i_roll = 12 set fw_ff_roll = 15 set max_angle_inclination_rll = 450 set yaw_lpf_hz = 30 set tpa_rate = 33 set tpa_breakpoint = 1300 set rc_expo = 20 set rc_yaw_expo = 30 set roll_rate = 35 set pitch_rate = 9 set yaw_rate = 9 set manual_rc_expo = 20 # battery_profile battery_profile 1 # end the command batch batch end