diesmal bei Traumwetter und ohne Crash. Aber ordentlich windig wars!
Es flogen:
- Kapa-Kopter: leider immer noch am zuckeln und ruckeln. Aber GPS funktioniert klaglos. Auch bei ordentlich Wind! Was mach ich nur mit diesem Kopter?
- Tricopter (alt):

Aufgespannt ist er immer noch eine beeindruckende Erscheinung 🙂
Er wiegt mit dem 4s Akku ca. 1kg. Aber die drei DT750-Motoren an 4s mit 9×5 Slowprops (alle gleicher Drehsinn) wuchten das spielend in den klaren Himmel. Nach ein paar Einstellrunden fliegt er einigermaßen ruhig (nicht perfekt, da leichte Vibrationen) und auch Self-Level klappt. Da er wohl einer der günstigsten Kopter ist, wird er wohl für viele Testversuche erhalten bleiben. Robust und einfach. - Edel-Tri: Jetzt mit 10×5 APC-Propellern, der Klang ist etwas rauer, aber er schwebt jetzt mit GoPro auch bei Halbgas und nicht erst bei 2/3. Das Flugverhalten ist immer noch perfekt. Mit den vorigen Graupner 9×5 war der Schwebeflug noch eine kleine Nuance ruhiger. Ich habe den Eindruck, die DT750 haben an 9×5 mehr Power, als die MT2216-800kV an 9×5 oder gar 10×5… Aber was die Laufruhe angeht, ist der Fall klar!
- FPV-Wing Nuri: Erstmal ohne FPV-Last, denn der Empfänger wurde ja auch getauscht. Es werkelt nun ein FrSky D4R-II drin. Der Nuri ist agil und zappelig, bei dem Wind also eine Herausforderung. Den Akku fliege ich fast leer, das ging leider ziemlich schnell, was mir sagt, dass die Effizienz nicht so toll ist. Es ist heute immer ein Akku-Warner dran, an jedem Fluggerät!
Aufsetzen der Brille nach Nuri-Abwurf kann ich mir auch mal antrainieren. Die Brille am besten schon am Kopf und nur runterziehen…
Nuri mit FPV-Last: Er wird gut nasenlastig, ist ja klar. Ich trimme vorsichtshalber schon mal Höhe, und es zeigt sich, zu Recht! Aber der Start ist unkritisch. Aber das Grundtempo ist schon deutlich höher und ich muss sogar noch mehr Höhe rein trimmen. Gegen den Wind wird er dann gemütlich langsam 🙂
Immer wieder Blicke in den Bildschirm, beinahe mit Touchdown, weil der Boden im Monitor nicht so großartig sich verändert, wenn man tiefer sinkt… und dann verliere ich ihn auch noch fast aus den Augen. Aber mit Bildschirmblick komme ich zurück! Geil!
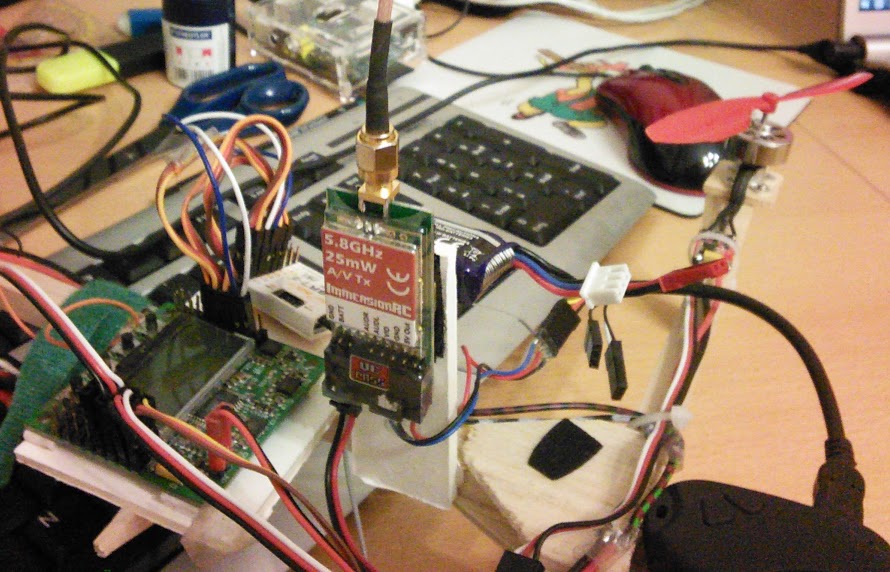
Der Videolink steht wie eine Eins. GPS und OSD kann ich noch gar nicht richtig würdigen, der Nuri ist halt doch ein Flieger, der gelenkt werden will und nicht gemütlich schwebt. Ich fliege den Akku abwechselnd auf Sicht und mit gesenktem Kopf zum Bildschirm leer. Keinerlei Störungen im Bild, es ist klar: ImmersionRC hat seine Sache richtig gemacht, sowohl von den Antennen als auch vom Sender und Empfänger. Ich habe da eher Sorgen, dass da wieder die Funke das Limit setzen wird 🙂
Und: Der Propeller ist rudimentär ausgewuchtet, das Bild zeigt keinerlei Störungen/Zittern/Rolling Shutter! Die 15€-FPV-Kamera (von hier) mit 170° Linse sorgt für ein sauberes angenehmes Bild. Nur die GoPro Hero 2 kann mit mehr Schärfe aufwarten.
Die Flugzeit ist nicht der Brüller, der Nuri mit dem Schwerpunkt zu weit vorne und dem zu hoch drehenden Motor braucht sofort 7A oder mehr, wenn man gegen den Wind noch Fahrt haben will. Da werde ich noch umbauen, z.B. einen Motor mit weniger KV und einen 7×4 Prop. 8×5 wäre wohl am besten mit einem 1200kV, aber da muss ich schneiden…