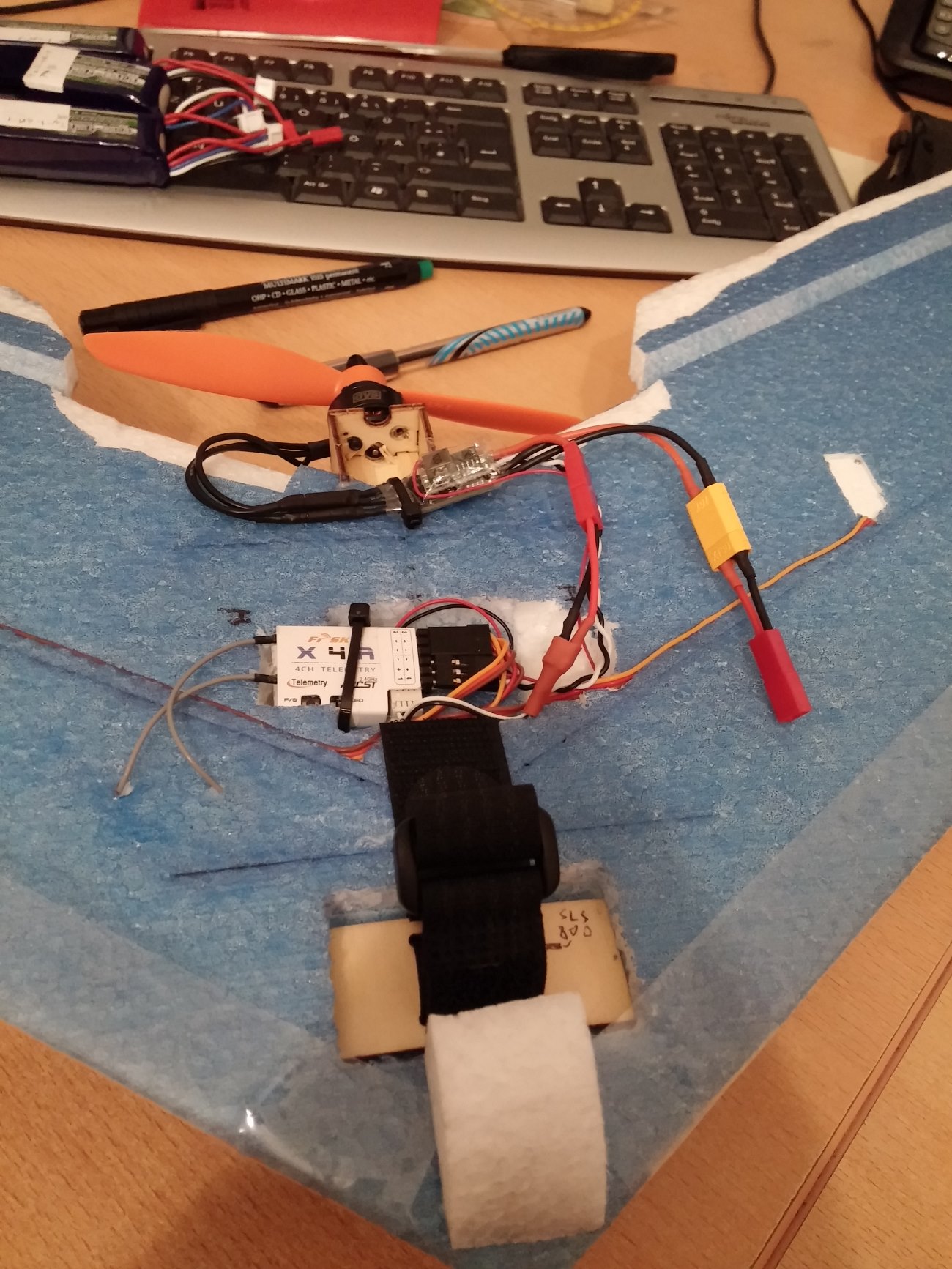
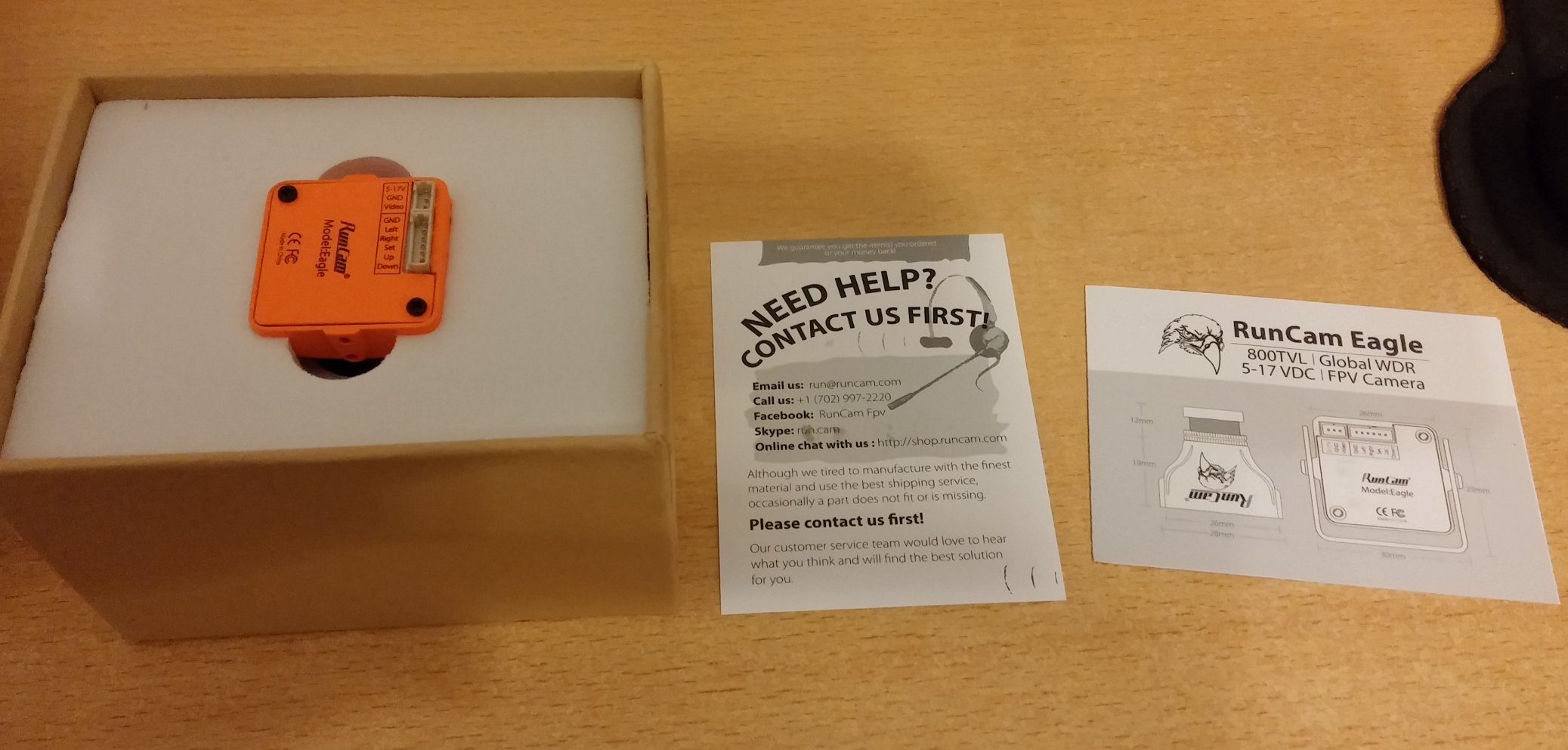
Das ist Lisam2 – auf einem Realacc X210 4mm-Frame, mit SPRacing F3 (Betaflight 3.1.3), Realacc HUBOSD eco, EMAX RS2205-2300, Racerstar 35A ESC (DShot), 3-Blatt DAL T5045C, FrSky X4R-SB, Runcam Eagle, Eachine Nano-FPV-Sender.
Dank X4R und F3 mit voller Telemetrie.
Nach bewährter Art innendrin wasserfest gemacht und mit Beeper, OSD, Stromsensor und Klarsichthaube aus einer Smoothieflasche bestückt 🙂
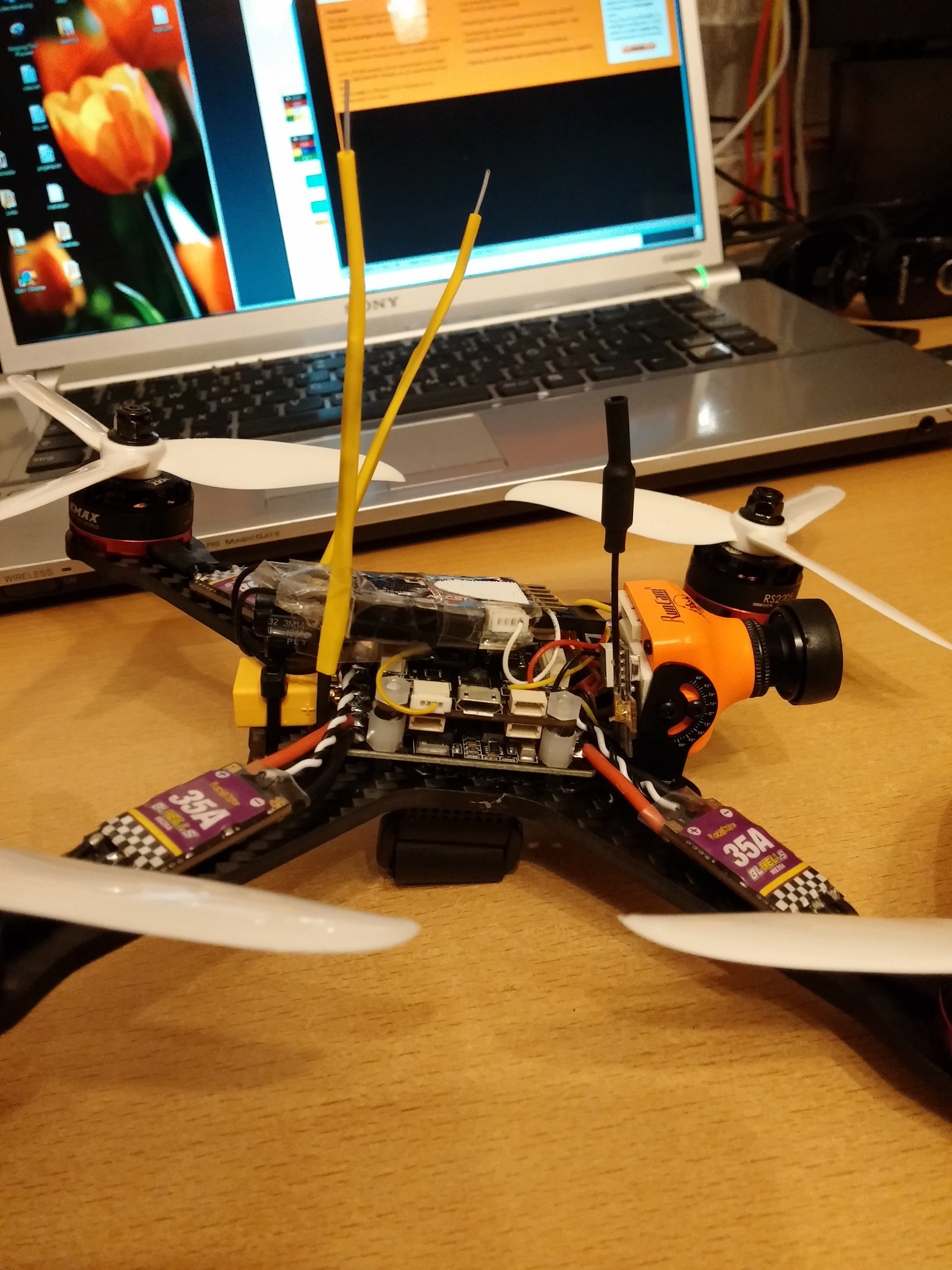
Das Topdeck des Frames hat mir nicht zugesagt. Die integrierte Kamerahalterung passt auch nicht zur Eagle, Skyplus, XAT600 oder Owl Plus. Also die mitgelieferte Kamerahalterung verwenden und Gewicht sparen! Der Stapel aus PDB und FC ist mit Nylonschrauben und Gummidämpfern fixiert. Der Nano-FPV-Sender ist mit dickem Spiegeltape direkt an der Eagle befestigt. Sozusagen AIO Deluxe!
Dieses Design lässt sich bequem an zwei Abenden bauen. LEDs könnten noch dran.
Die PIDs grob voreingestellt, wartet er auf seine ersten Outdoorflüge.
Gewicht ohne Akku: Nur 294g!
Ich hab ihm heute seine 2×4 RGB-LEDs verpasst (wie beim LightRace) und ein Baro (weil’s geht – einfach an I2C anlöten!)