


Das ist mal ein Projekt!
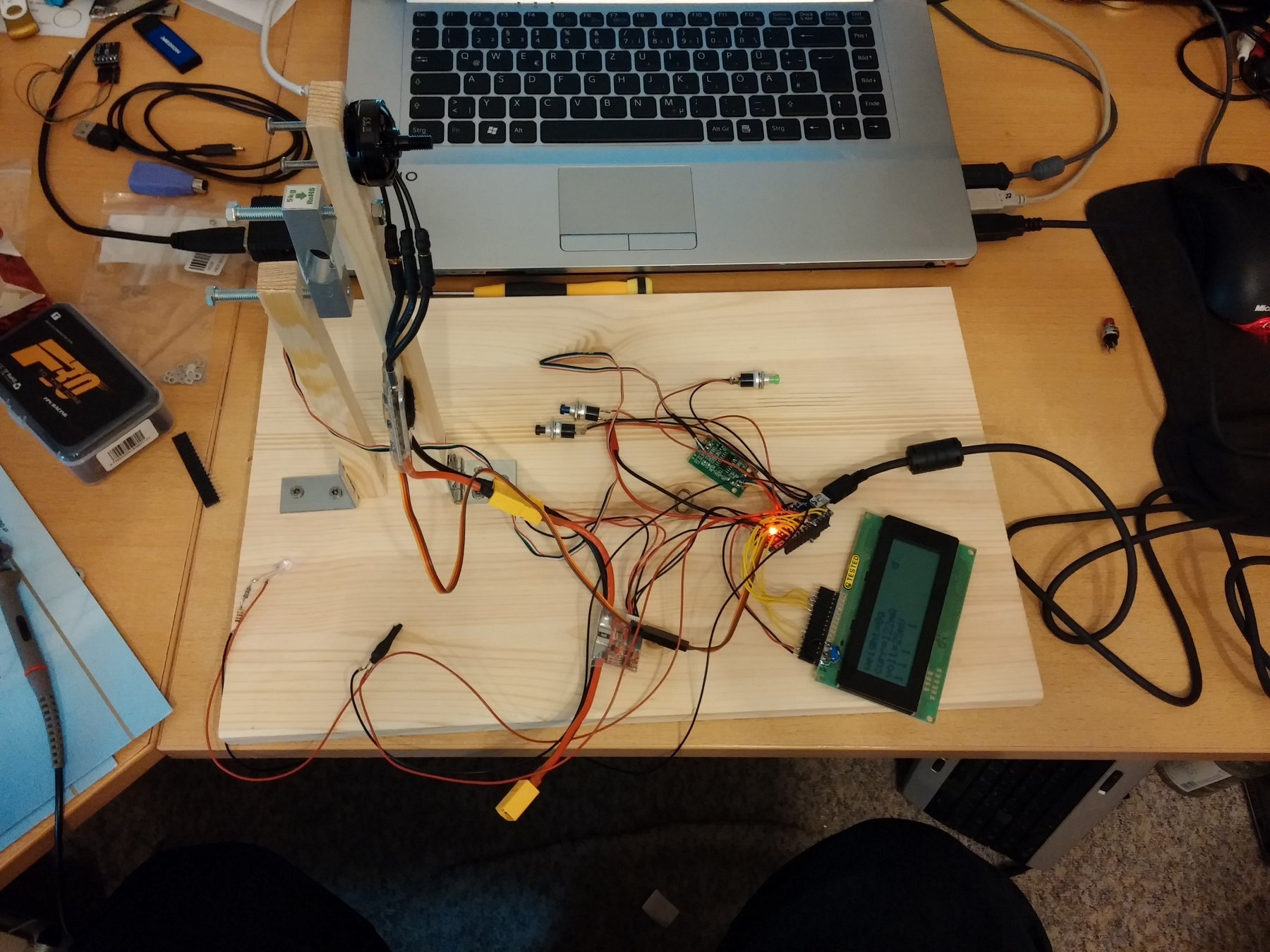
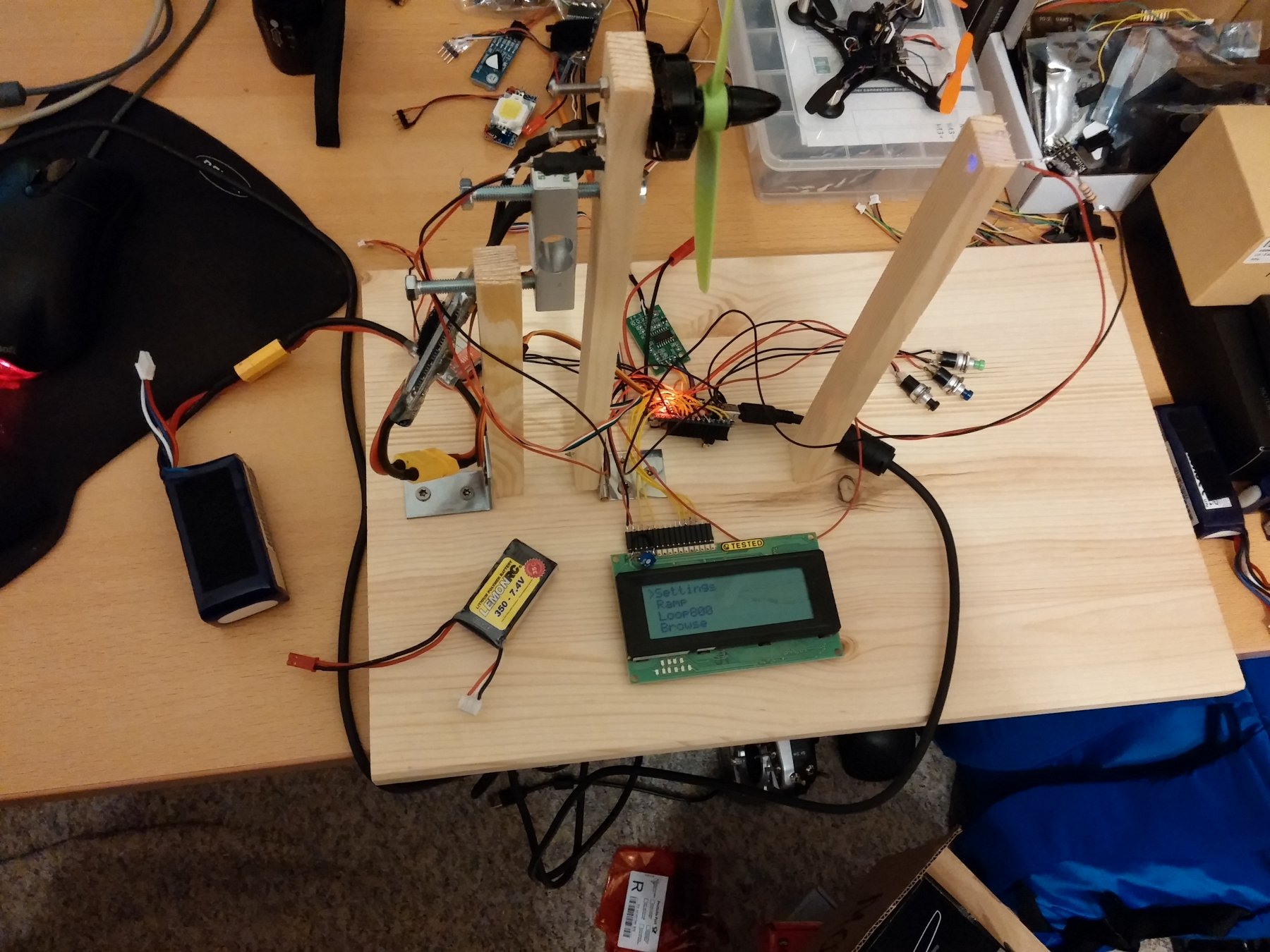
So viel HW ist es ja nicht: Ein Arduino nano + HX711 und Waage, 20×4 LCD, APM-Currentsensor und Fototransistor mit IR-LED.
Dazu die aufgefeilte Konstruktion aus Holz (wobei 600g Schub schon gut am Ständer biegen!)
Kabelverhau – ach geh!
Fazit: Funktioniert.
Die Software ist da eher interessant. Die Messwerte werden alle gefiltert. RPM macht sich den Pin-Change-ISR zu nutze. Das Menüsystem ist elegant in Tabellen abgelegt und alle Einstellungen werden redundant im EEPROM gesichert. Der interne Rekorder zeichnet alles auf und man kann nachher die Messwerte durchsehen. Am PC kann man natürlich auch über USB mitloggen.
Hier ein Beispiel mit einem AMAX 2204-2300kv an Kingkong 5x4R und 3s (der Akku ist schon etwas schwach):
-> Messung #0 Voltage= 11903 Current= 259 Thrust= 22 RPM= 4920 -> Messung #1 Voltage= 11862 Current= 846 Thrust= 78 RPM= 7560 -> Messung #2 Voltage= 11830 Current= 1615 Thrust= 134 RPM= 9720 -> Messung #3 Voltage= 11777 Current= 2453 Thrust= 178 RPM= 11160 -> Messung #4 Voltage= 11746 Current= 3289 Thrust= 223 RPM= 12480 -> Messung #5 Voltage= 11718 Current= 4178 Thrust= 272 RPM= 13560 -> Messung #6 Voltage= 11635 Current= 5028 Thrust= 314 RPM= 14460 -> Messung #7 Voltage= 11575 Current= 5876 Thrust= 348 RPM= 15300 -> Messung #8 Voltage= 11554 Current= 6808 Thrust= 394 RPM= 16140 -> Messung #9 Voltage= 11474 Current= 8398 Thrust= 463 RPM= 17280 -> Messung #10 Voltage= 11335 Current= 10406 Thrust= 533 RPM= 18720