Die Post hat bei mir den Lieferrückstand aufgeholt – alle Sendungen vom Banggood sind jetzt angekommen. Es darf gebastelt werden 🙂 PuTTY download
PID-Tuning
Nachdem der PocketTri immer so schwammig fliegt, habe ich mich nochmal an den PIDs versucht. Und siehe da: Ich konnte mühelos Roll/Nick auf P=10.0 hochstellen ohne dass er zittert oder aufschwingt (Looptime=2000, PID-Type=1)! Das ist fast schon unheimlich. Vermutlich sind die SN20A mit BLHeli so aggressiv.
Yaw ist auf P=6 (bei mehr wird das Servo zappelig – evtl. kann man das mit dem Servofiltering wieder einbremsen – also P hoch bis der Copter sich aufschwingt, dann wieder reduzieren und dann das Servofiltering runtersetzen, bis es wieder aufschwingt, dann wieder hoch. Zumindest stelle ich mir das so vor).
Und dann wollte ich irgendwann mal die neueste Cleanflight-Firmware aufspielen, wenn die das Servo-Einstellen wieder flott gemacht haben – die hat ein paar Features, die ich will (Beep bei Arm/Disarm, Lage-Regelung auch im „Standgas“).
Baufortschritte
Fast fertig 🙂
So wiegt er genau 180g (mit FlightControl). Dazu eben noch 10g RX, 10g Props und Akku (1000 3s: 90g) und ca. 10g Extras an Kabeln und Steckern – sollte dann 300g geben! 40g FPV dazu: 340g – Wahnsinn!
Copterflugtag
Das Copter-Team fliegt DJI – in allen Größen und Ausführungen: Phantoms, F550, Hexa, Okto, Hauptsache groß und mit GPS.

Während ich mit den kleinen Coptern rumheize.
Ich hab mir dann auch mal einen F550 bestellt… so ein Lufthaken ist bestimmt nützlich 🙂
Crash-Day mit der Libelle
Libelle mit Schleppvorrichtung (für den Copter-Senkrecht-Schlepp):

(auf dem Bild schon mit FrSky-Rx mit Telemetrie für extra Reichweite)
Und dann das:

War wohl zu weit weg – Spektrum halt. Dann eingeschlagen aus 30m Höhe fast senkrecht runter. Nach dem Crash sah ich noch, dass das Höhenruder ab war (Gabel am Gestänge gesprengt). Könnte natürlich auch der Grund sein.
Mittlerweile ist der Flieger wieder ganz und heute wurde wieder munter geschleppt. Auf über 100m komme ich mit nur Werfen halt nicht 🙂
LED-Power


Leichtbau
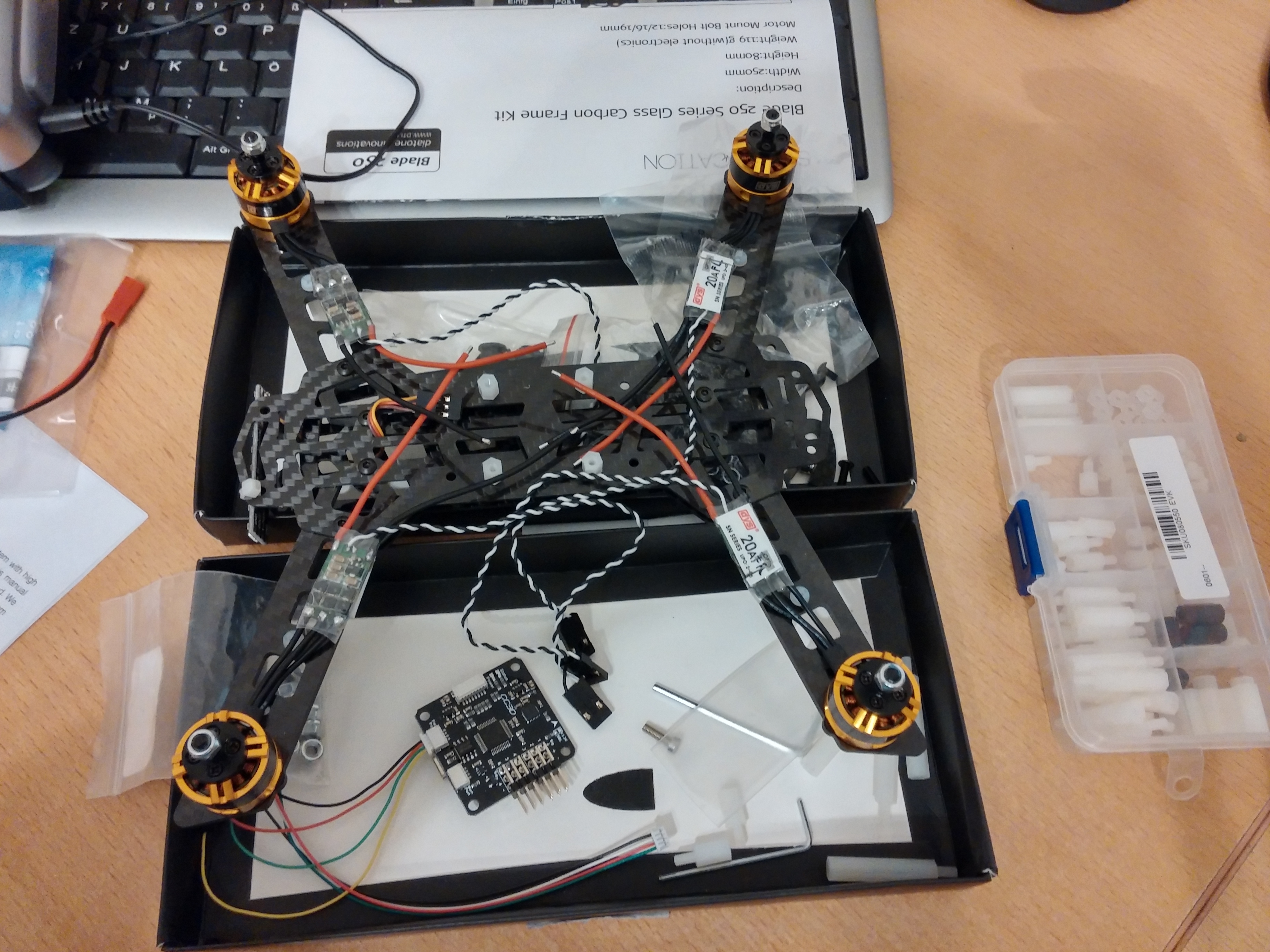
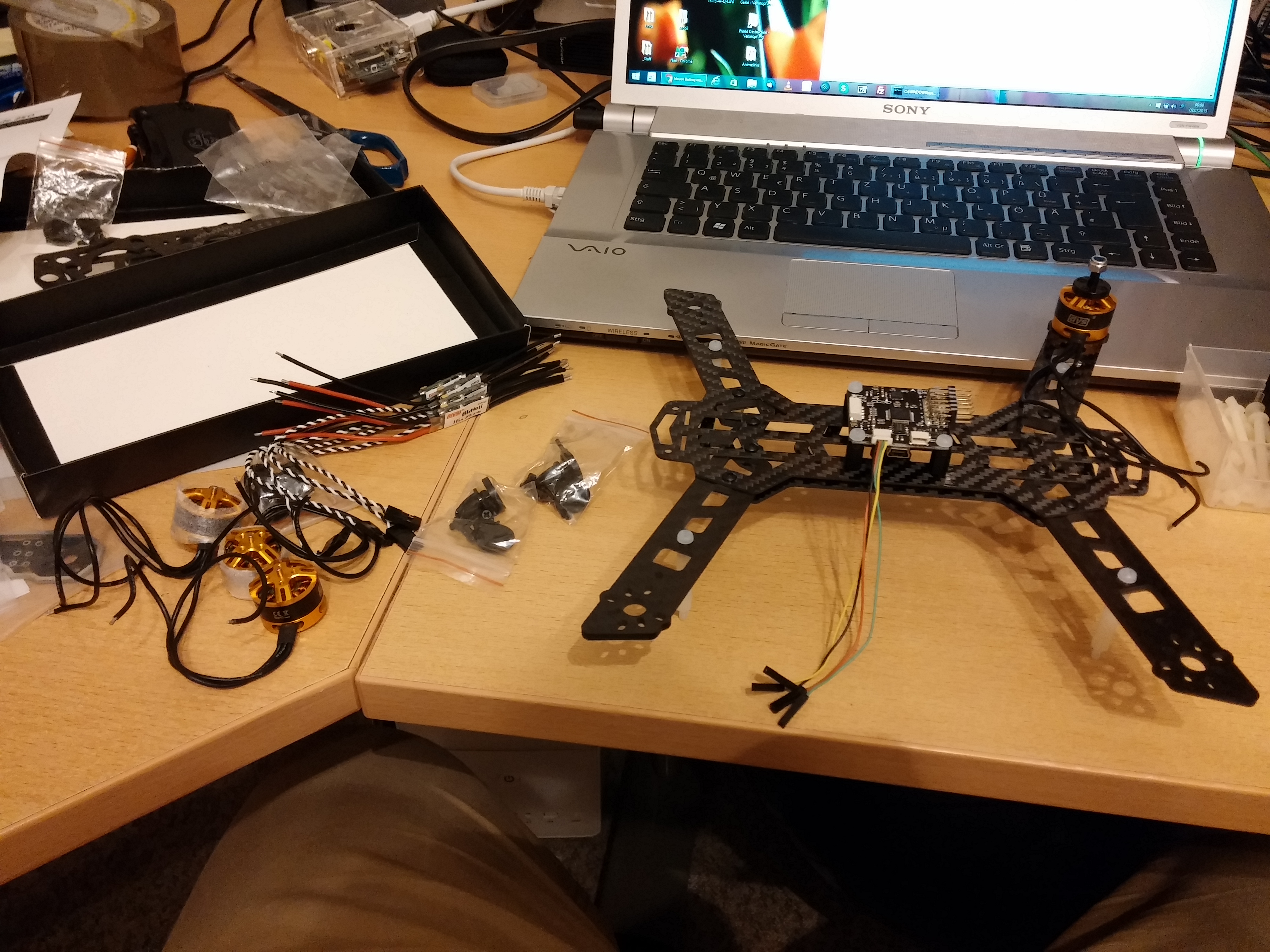
Zum Testen hier ein anderer Frame:
Diatone Blade 250 Series. Ein echtes Leichtgewicht. Echtes 3K-Carbongewebe (sieht auch echt aus). Gewicht stimmt auch. Die Bohrungen sind sauber und fast spielfrei. Für 31€ ein Schnäppchen!
Der ist echt leicht! Ganzer Frame: 93g, nur das Carbon: 67g. Der untere Teil (ohne den Deckel, Füße, Kameraplatten) verschraubt: 57g. Das geht natürlich auch auf die Crashresistenz.


Dazu werfe ich noch 4 DYS 1806-2300 (je 24,5g mit langen Kabeln) und 4 SN20A (je 6g) – die CC3D wiegt 10g mit Kabeln und Füßchen.
Wenn ich jetzt noch abschätze: RX 10g, FPV 30g, Akku 100g komme ich auf 329g!
Ortungstechnologie
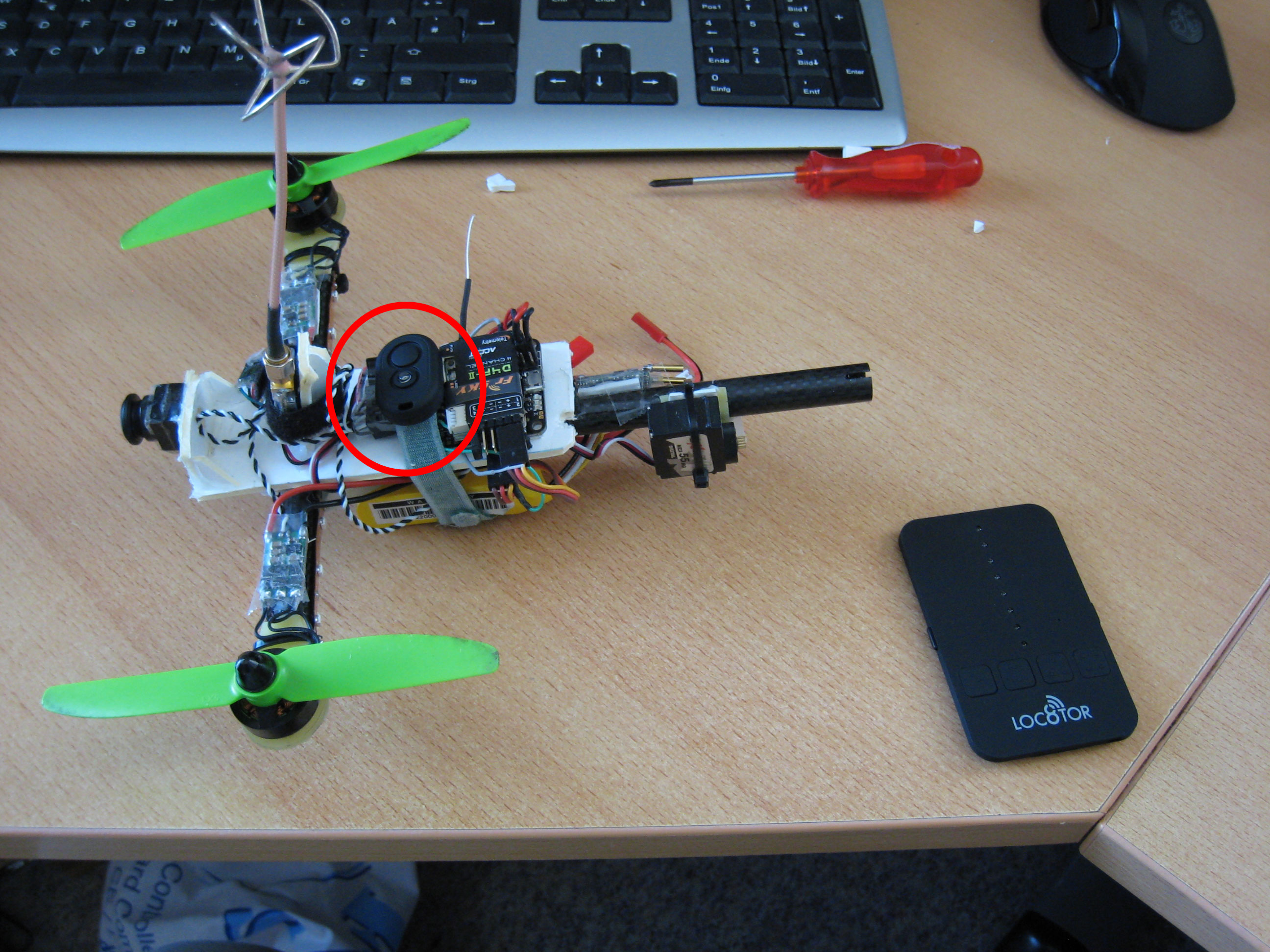
So sollte ich den Copter auch in einem hohen Maisfeld, etc wiederfinden. Reichweite ca. 120m. Aber ich sollte ungefähr die Absturzstelle kennen.
Der Heckmount ist momentan in der Nachbearbeitung. Der hat zuviel Spiel gekriegt.
Brillen-Sommer-Mod
32° und es wird noch heißer…
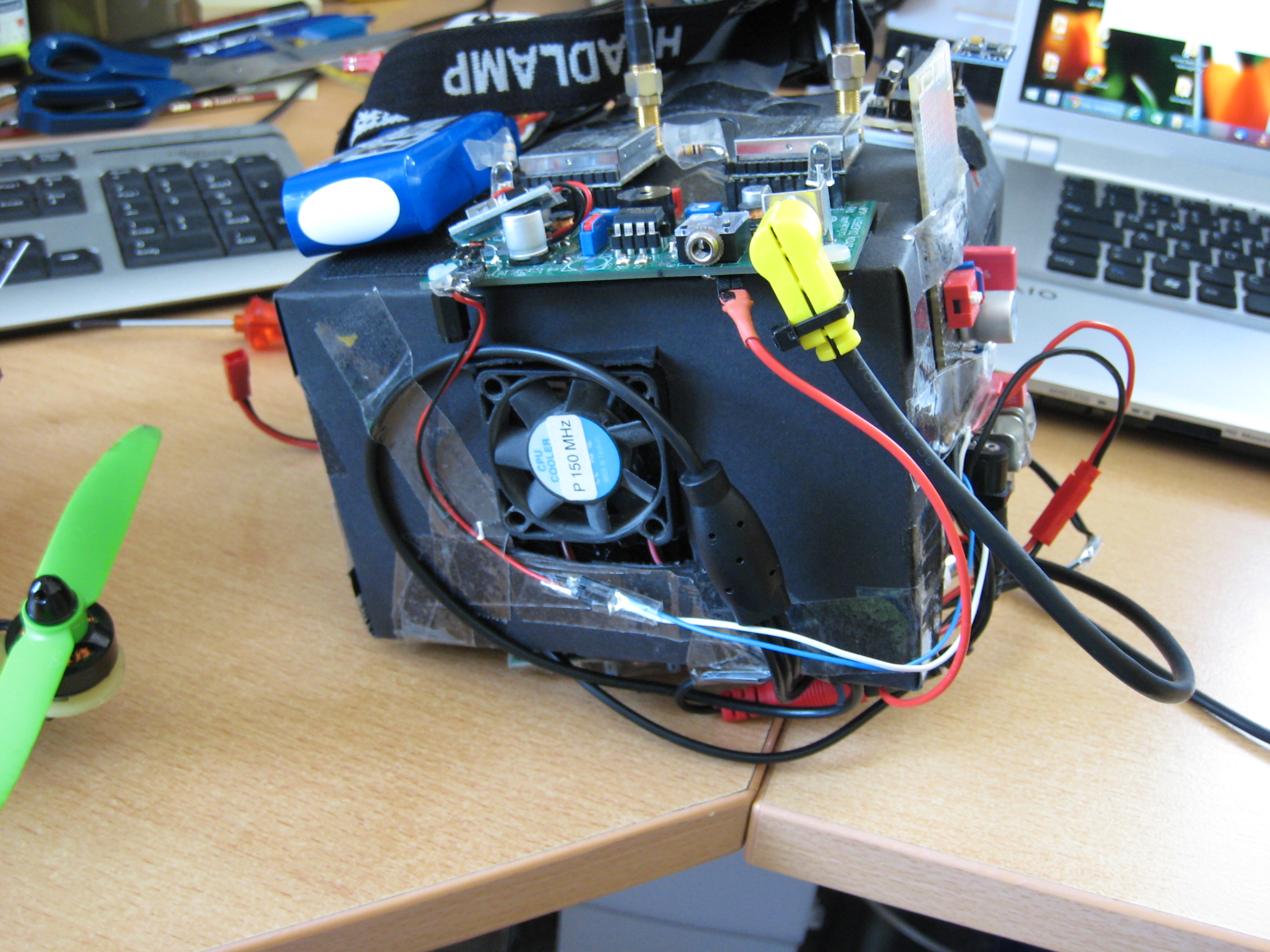
Da muss aktive Kühlung der Komponenten her.
Der Monitor überhitzt nämlich putty download , bzw. sein Schaltwandler! Dann schaltet er kurz aus und wenn er ein paar Sekunden später wieder ok ist, wieder an.
Der Lüfter stammt von einem Pentium II 150MHz. Schön leise und läuft mit 12V. Er ist steckbar, im Winter stecke ich ihn dann ab. Der leichte Luftstrom gelangt auch durch die Brille ans Gesicht 🙂
How-to: SimonK-Regler auf BLHeli umflashen (SN20A)
So, meine SN20A performten doch nicht so toll an den kleinen hochdrehenden Racermotoren (RCX1804-2400).
Also: Umflashen!
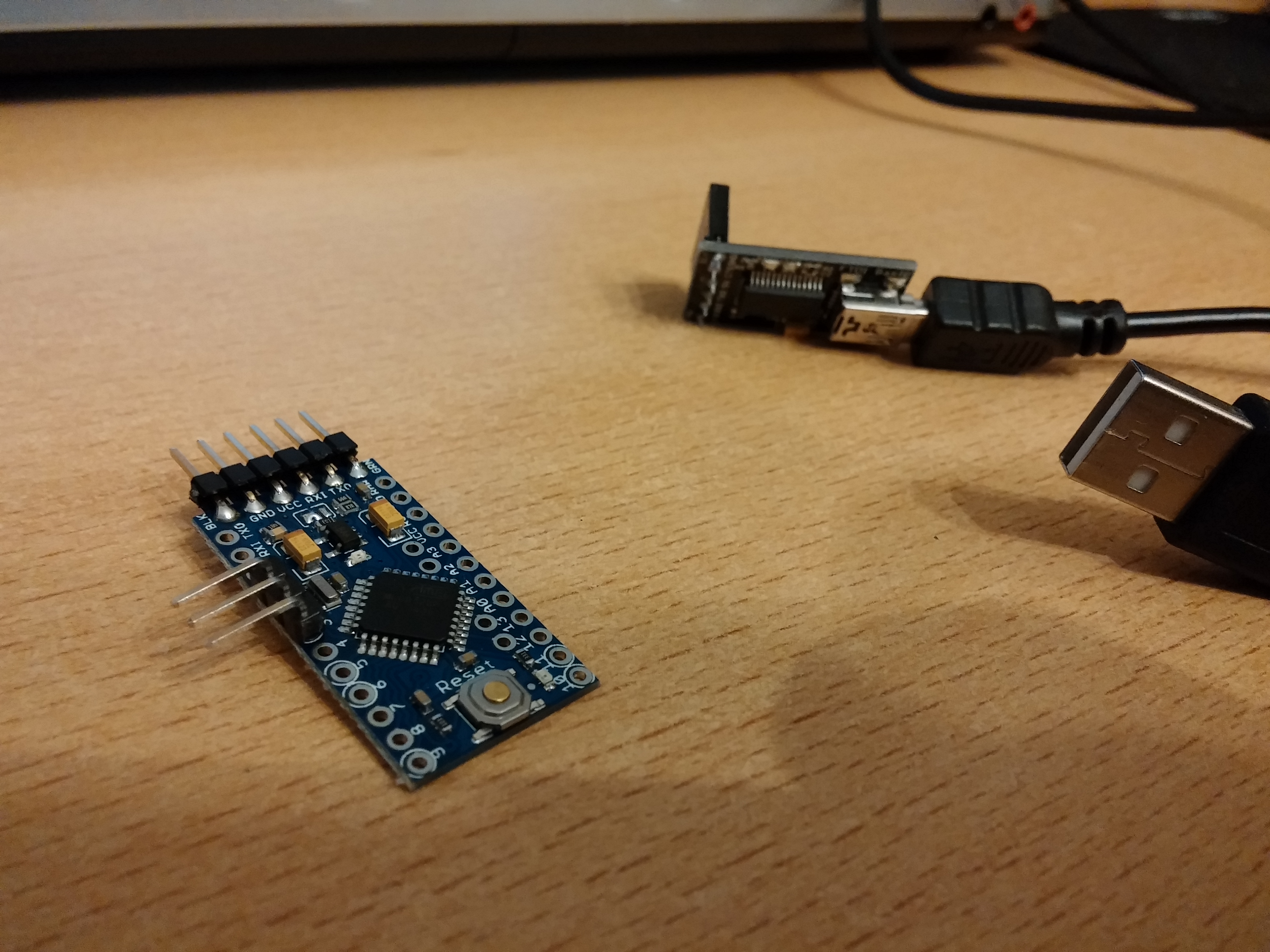
Man nehme BLHeli-Suite (von https://github.com/bitdump/BLHeli), einen Arduino pro mini, einen FTDI USB-seriell-Adapter (für den Arduino) und den Regler+Akku.
Der FTDI kann 5V haben.
Arduino an FTDI stecken und an den PC mit USB – dann im BLHeli den Reiter „Make Interfaces“ öffnen:
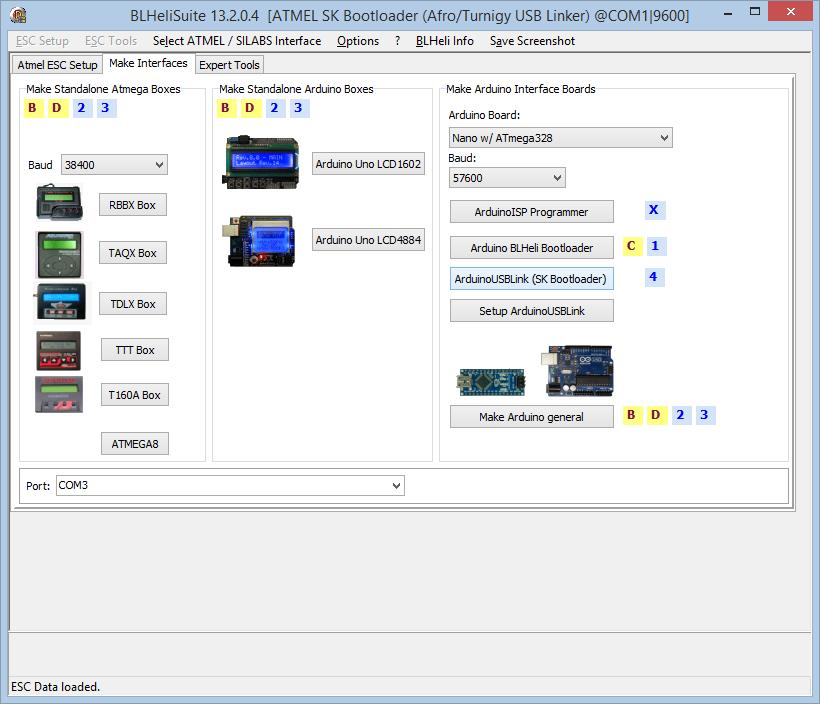
Mit ArduinoUSBLink flasht die BLHeliSuite den Arduino zum Interface. Dann darf man noch auswählen, ob D3,D2,GND als Servoverbinder für den Regler herhalten sollen (ja, ist eine gute Idee). Im BLHeli noch „Select ATMEL / SILABS interface“ -> „Atmel SK Bootloader (Afro/Turnigy)“ anwählen.
Dann kann man auch schon umflashen. Einfach Regler an die Pins D3-Signal, GND-GND stecken, mit Saft aus dem Akku versorgen und richtigen COM-Port wählen und „Connect“ in „Atmel ESC Setup“.
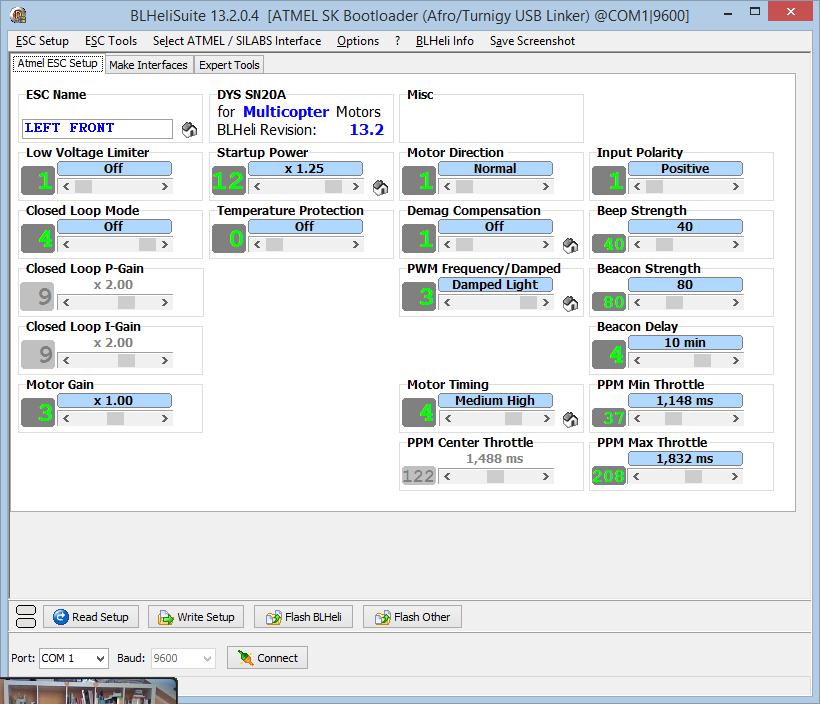
Mit Flash BLHeli geht’s dann los: Richtigen Regler auswählen, MULTI auswählen auswählen und auf Flash klicken. Bestätigen und nach 20s ist der Regler fertig. Jetzt kann man die Parameter nach Lust und Laune ändern.
Für die RCX1804 so:
Hier noch ein paar Youtube-Anleitungen: