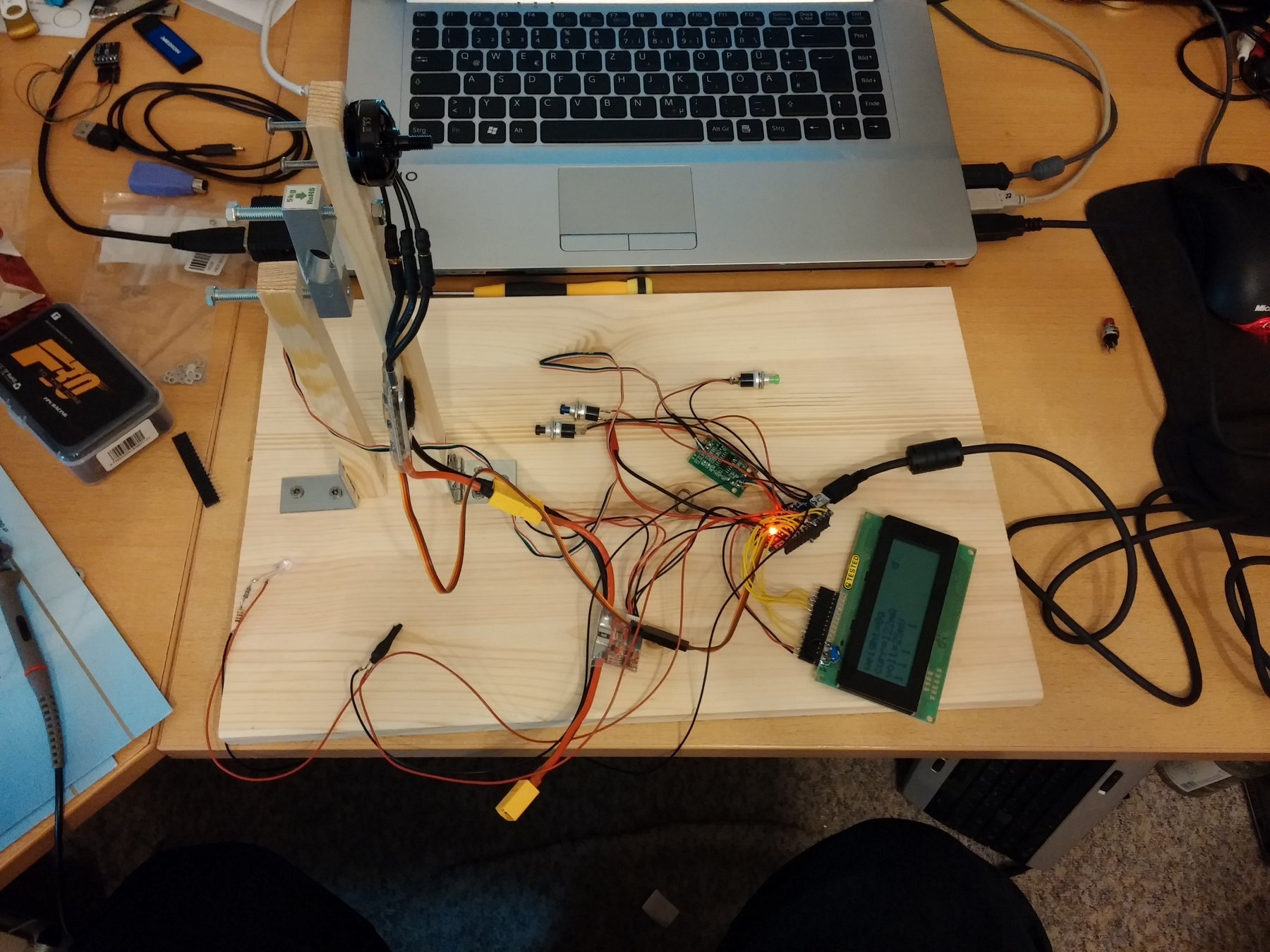
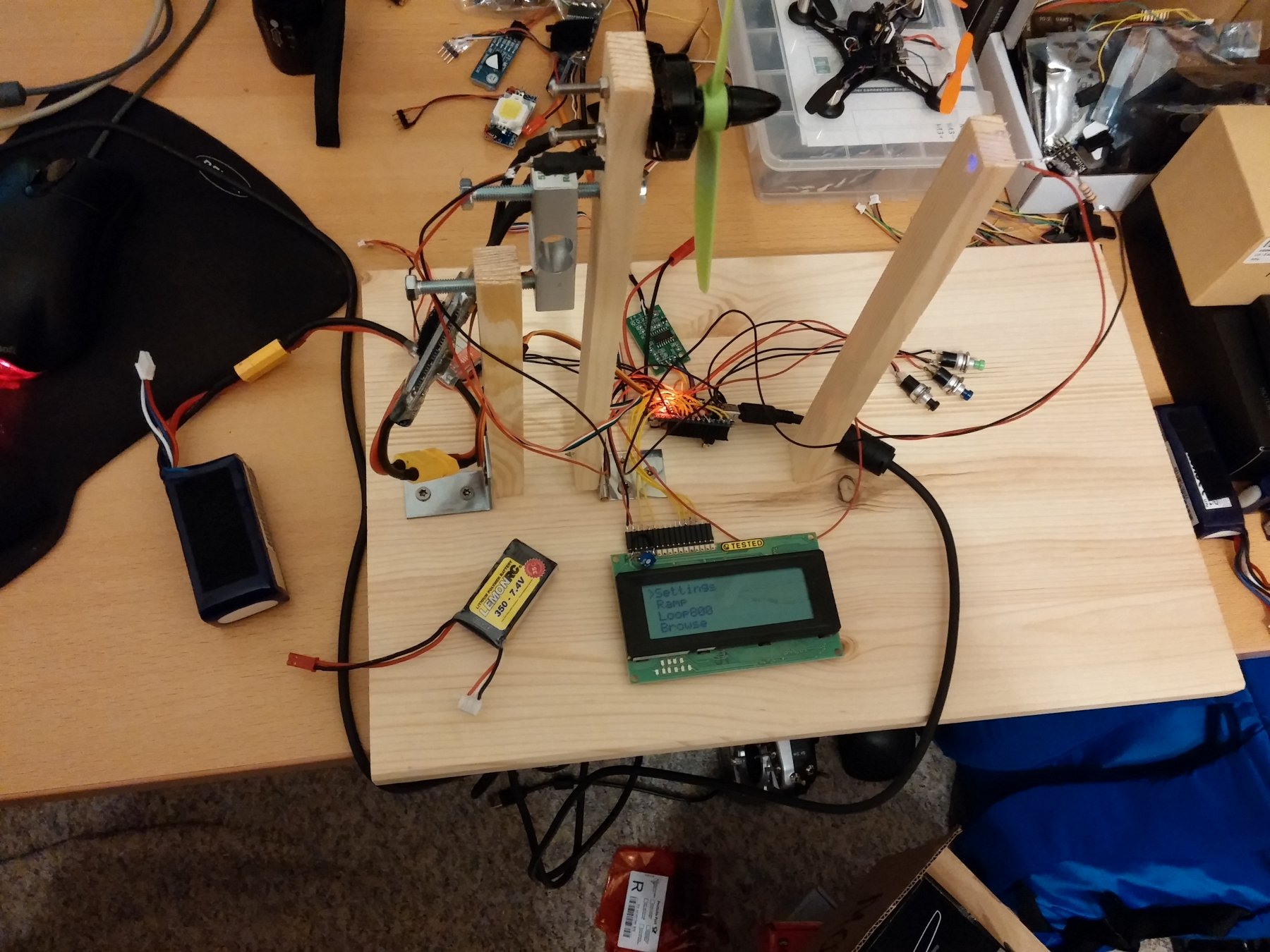
Mein kleiner LightRace mit den AMAX 2204-Motoren mag keine Triblades. Die sind zu stromhungrig. Der Messstand entlarvt: Sämtliche Triblades ziehen an 4s über 20A aus den armen 2204-Motoren, die dabei so heiß werden, dass man sie nicht längere Zeit anfassen kann. Und das geht auf den Akku und der Wirkungsgrad ist auch dahin!
Die effizientesten sind nämlich:
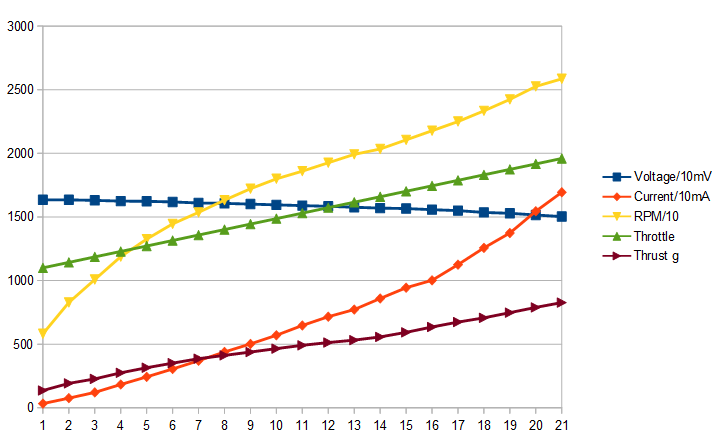
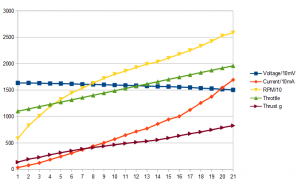
Die windigen Gemfan-Props!
Die schaffen genauso viel Schub, aber an knapp 17A. Und der Motor wird nur warm.
Die HQ 5×4.5 machen den zweiten Platz, die sind auch recht gut (aber auch teurer).
Alles andere (FC, noname, DAL Triblade) ist schlechter an diesen Motoren. Die HQ 5×3 sind da außen vor, die liefern nur 660g bei 13,4A. Für ein effizientes Setup vielleicht interessant. Aber da nehm ich dann lieber 6×3-Carbon-Props und einen großen 3s-Akku. Da fliegt der Racer auch easy 15 Minuten.
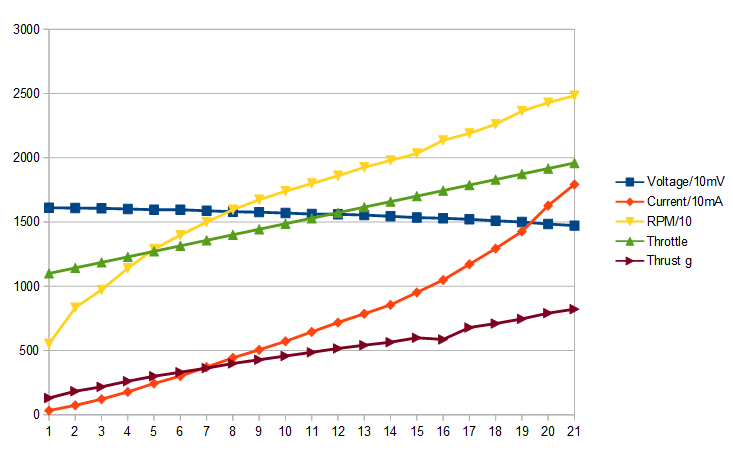
HQ 5×4.5:
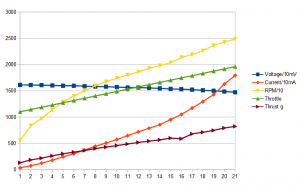
Gemfan 5×4:
Der EMAX RS2205-2600 dagegen hat kein Problem mit Strom und Wirkungsgrad. Der zieht einfach brutal durch und wird nur gut warm dabei. Egal ob Dual- oder Triblades an 4s. So erzeugt er 1,16kg Schub an 32A mit den DAL T5045C Tri. Und fegt dabei alles weg, was an den Wänden hängt 🙂 – da kann mir dann der Lipo bloß noch leid tun! Und ich halte den Messstand gut fest, der fliegt sonst auch!