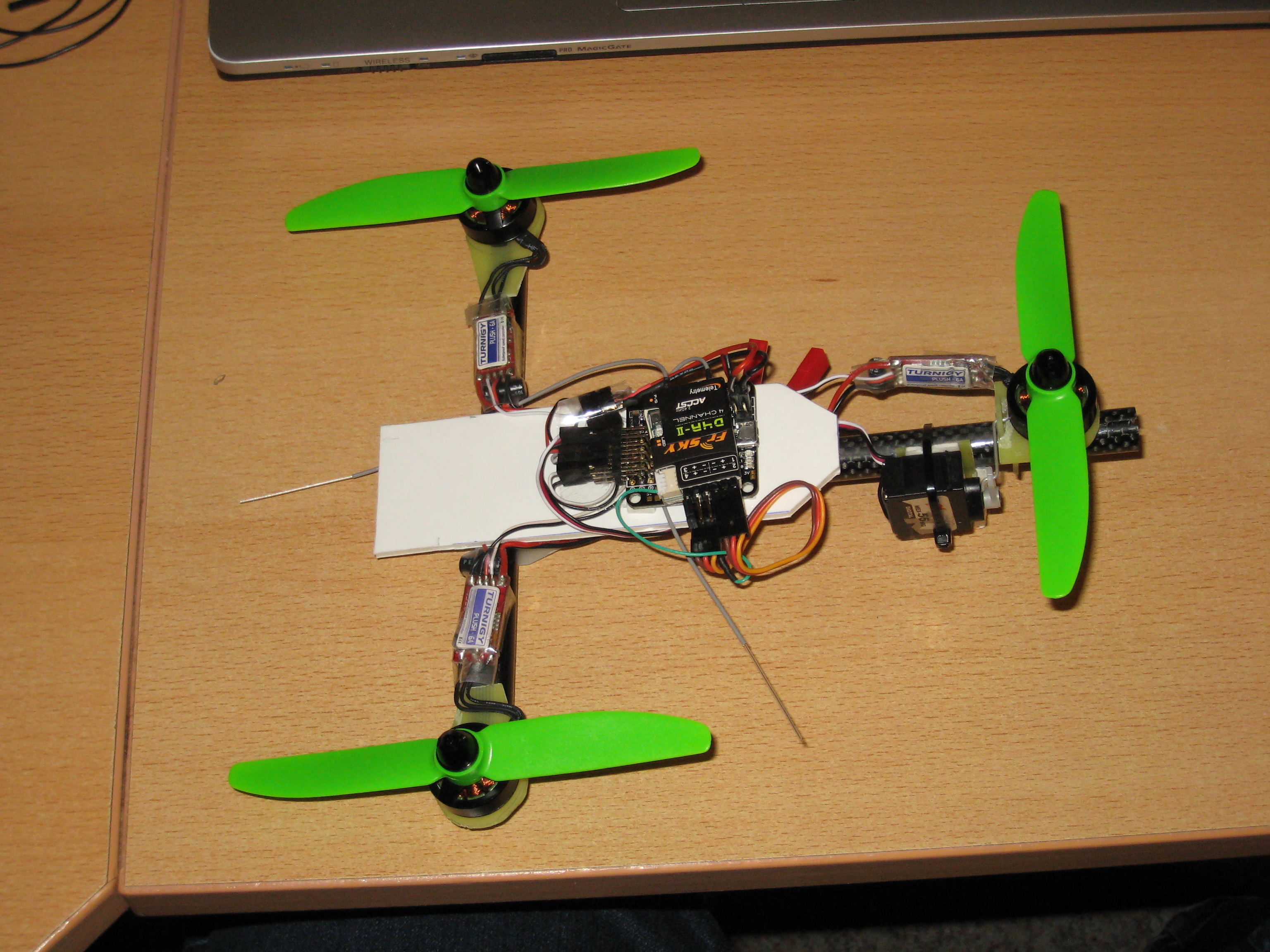

Klein, süß – und leicht.
135g ohne Akku (Akku 50-90g). Der Frame allein wiegt 25g. Das dicke Servo 12g. Motoren, ESCs und AcroNaze32 85g mit Kabeln. Bleiben noch 13g für RX, Beeper, diverse Tesa und Doppelklebebänder, Kabelbinder und den Heckstandfuß. Ich habe flach gebaut – und vergessen, dass meine Tris alle mit Servo wackeln und so der Rotorkreis in den Boden kommt…
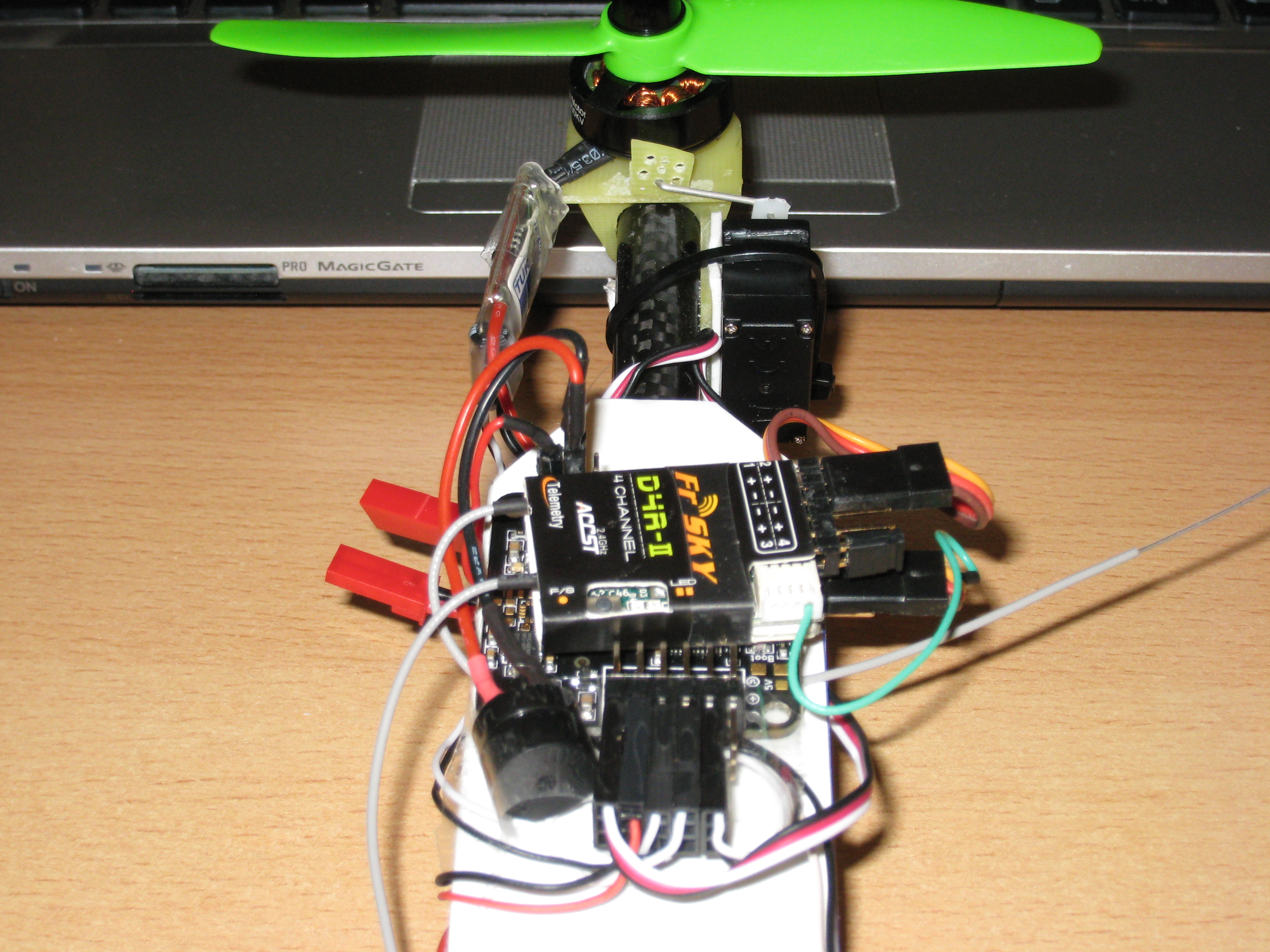
Mein Yaw-Mechanismus nutzt das Heckrohr als Gelenk! Hat leider auch etwas Spiel.
Und fliegen kann er auch ganz schön.
- 3x RCX-Motoren 1804-2400
- MEX-55MG Servo
- 3x Turnigy Plush 6A mit BLHeli Multi v13 (medium-high puttygen ssh , Startpower 1.25) – da muss man zum Flashen nur 3 Pins löten.
- HQProp 5×3
- AcroNaze32
- D4R-II (ich brauch unbedingt mehr von denen)
Settings: Looptime 2000, OneShot125, Failsafe 1200, Softserial Telemetrie …
Erste PIDs: Roll+Pitch P/I/D = 5.0/0.030/20; Yaw = 5.5/0.020/0; TPA = 0.05; Rates 0.20/0.20; RC Rate = 1.00; Expo 50; Throttle mid = 0.44+Expo 10