Mit Arduino ist das kinderleicht.
Das VU-Meter ist jetzt auf ESP32 – mit Features wie
- Webinterface
- OTA-Update
- Verstellbare Muster, Farben, Geschwindigkeit, Empfindlichkeit…
- DAC-Offset (kompensiert den nicht-linearen ADC)
- Autogain

Mit Arduino ist das kinderleicht.
Das VU-Meter ist jetzt auf ESP32 – mit Features wie
a.k.a. DJI mini 2
Mein zweiter DJI-Luftnagel (ich hab ja auch einen uralten F450 Hexa mit DJI Naza).

Erste Erfahrungen:
Lädt an USB (aber mit Quickcharge) – so 18W gehen rein.
Handy erforderlich mit App und man muss locker 10 Info-, Lizenz-, Vertrags-, etc Texte abnicken.
Kompakt und leicht. Das Plastik wirkt schon grenzwertig dünn. DJI hat wohl an jedem Teil Gewicht abgespeckt.
Mein altes Handy (LG G5) geht sogar. Allerdings ist das Display für draußen zu schwach. Man erkennt also nicht gut, was die Kamera sieht.
Einmal Kompass kalibrieren, dann kann’s losgehen (wie beim Naza).
Starten kann er auf Knopfdruck.
Beim Landen hapert’s dann an der Fläche (Feldweg) – den findet er nicht wieder und jammert dass ich doch bitte manuell landen möge. Ja mei. Beim manuellen Landen fragt er dann lieber nochmal, ob man da wirklich landen mag. Ja scho, echt. Ist für mich jetzt kein Beinbruch.
Auto-RTH fliegt brav auf die konfigurierte Höhe und kommt dann runter (wo er dann den Feldweg nicht findet).
Die Steuerung ist flüssig. Fetzt auch nett rum, das Teil.
Das Gimbal hält das Bild immer gerade.
Das Set ist schnell flugbereit (wenn man das Handy schon in der Funke hat). Arme aufklappen, Gimbal-Cover runter, anschalten, kurz warten. Los geht’s.
Und super kompakt ist das Set auch. Man kann die Knüppel abschrauben und am Sender verstauen. Da passt das Gerät in zwei Hosentaschen.
Im Vergleich zum F450 ist er nano-klein 🙂
Das Gimbal und die 4k-Kamera sind natürlich auch ein Schmankerl.
Der HV-LiPo-Akku soll 200 Ladezyklen halten. Er wird automatisch nach ein paar Tagen auf Storagespannung entladen (intern).
Diverse Youtuber erreichen Reichweiten von etwa 3km. In FCC etwas über 4 (dann ist der Rückflug erforderlich).
Dank Arduino ganz einfach:

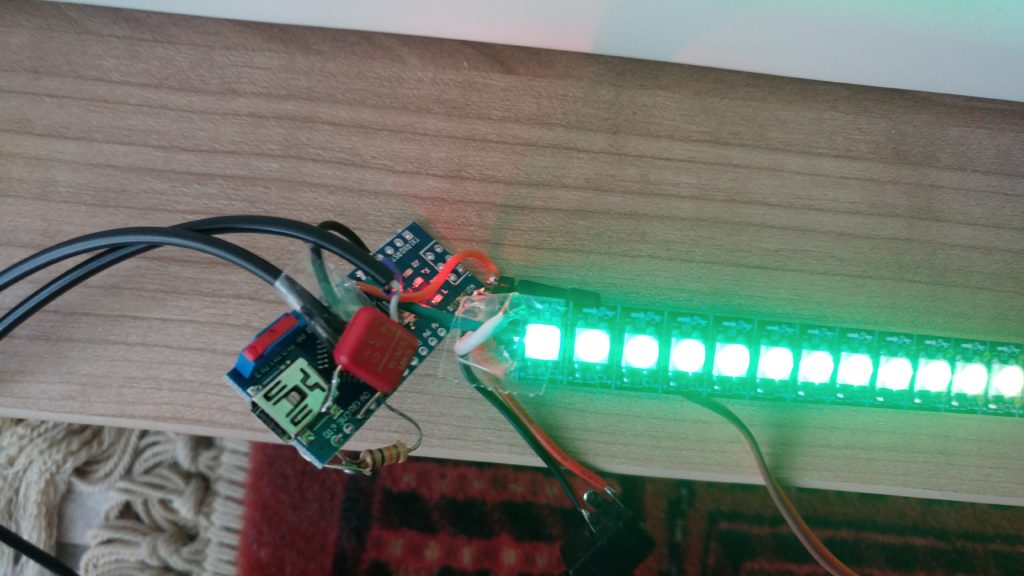
Teile:
Ein Arduino nano
Zwei LED-Strips WS28xx mit je 64 LEDs (kann man aber im Code anpassen)
Zwei Cinchstecker mit Kabel
Zwei 10k-Widerstände (für die Analogeingänge)
Ein 100nF-Kondensator (für AREF)
Optional ein Umschalter (für die Empfindlichkeit)
Ein Netzteil 5V mit mindestens 3A
Hohlbuchse für Netzteil
Features:
Peakanzeige
Farbverlauf von Grün nach Rot
1,1V Empfindlichkeit / Umschaltbar auf ca. 0,15V
Anschlüsse:
A1(rechts), A2(links) als analoge Eingänge, je 10k gegen GND
Die LED-Strips gehen an D3 (links) und D4 (rechts) fürs Signal (und natürlich an 5V und GND)
Ein Kondensator 100nF an AREF gegen GND
Schalter an D10, D11 (Wechsler/Mitte), D12 — zur Umschaltung der Empfindlichkeit
Das Netzteil an Vin und GND
Code:
Basiert auf https://www.dropbox.com/sh/0lafr2g6qs6okcs/AADiXGPpZgwAj4dSIIaryCzta/VU_meter_-_LED_Strip
Die kleinen Motoren haben nur Gleitlager. Diese sollte man mit synthetischem Öl (Nähmaschinenöl) ölen. Tipp von https://www.youtube.com/watch?v=NICLfudfkR4
Umso kleiner der Motor, desto besser.
Große Motoren haben versiegelte Kugellager – diese sollte man nicht ölen. Da ist die Schmiere schon eingebaut.
Beim Einstellen und Ausprobieren Propeller ab!
Propeller-Drehrichtung immer überprüfen!
Kaputte Propeller tauschen!
Turtlemode nur im Notfall und nicht, wenn der Copter festhängt! Gefahr des Reglerbrands!
Failsafe setzen!
Neue Copter erst mal „einschweben“!
FPV-Frequenzen checken!
Bei Events und Meets Frequenzen absprechen und vor Einschalten ankündigen!
Nicht auf Kies starten und landen! Gefahr durch Steinschlag!
Rucksack auf Vollständigkeit prüfen (Sender, Brille, Lipos, Tools, Propeller, …)
Akkus auf Storage lagern!
Ich habe gerade ein Spektrum-Flugzeug gebunden.
Das war eine Odyssee…
Der ESC wollte nicht armen. Zuerst habe ich versucht, zu trimmen. Kein Erfolg. Dann „Extended Throws“ im Modelsetup. Nix wars.
Die Lösung: Enable Max Throw! Erst dann kommt aus dem THR-Ausgang genügend kurze PWM raus. Die ganzen anderen Optionen sind danach nicht erforderlich.
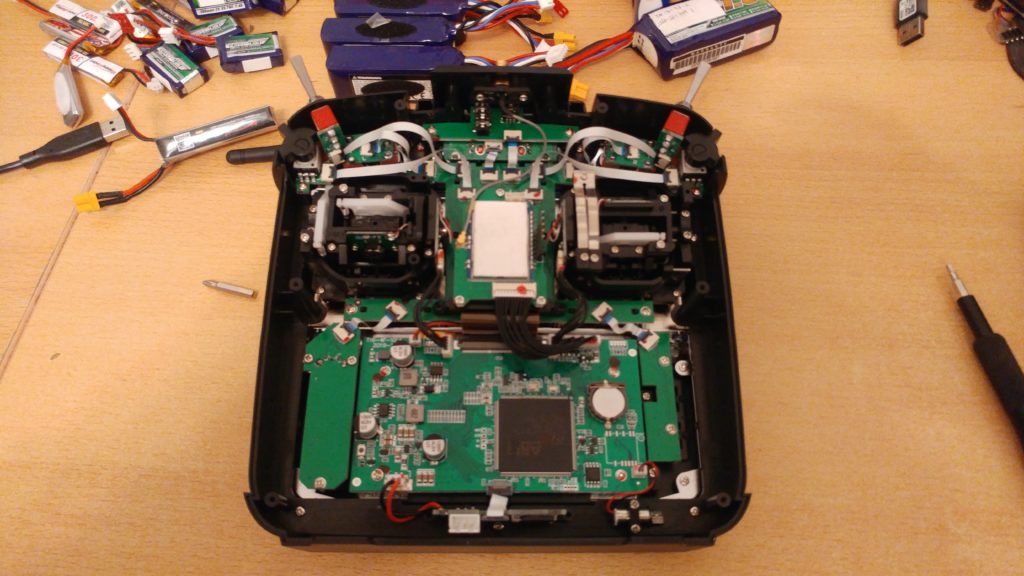
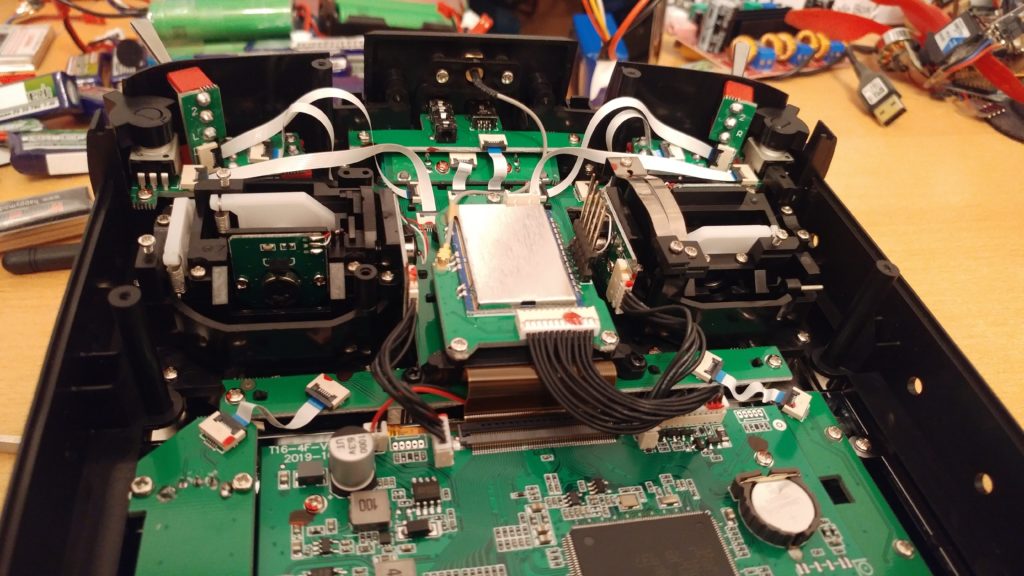
Ich musste einfach mal reinschauen! So ordentlich!
Ich hatte einen Schalterdefekt, war aber nur ein schlecht gestecktes Kabel.
Das neue Top ist aus TPU gedruckt. Da drin geht’s etwas eng zu. Als Kamera dient eine Runcam nano3 mit Eachine nano vtx.


Die Firmware gibt es hier. Man braucht die STM32-Version mit „noinv“ (internes 4in1-Modul) und dem passenden Kanalmapping (ist wohl für manche Protokolle wichtig).
Firmware herunterladen und auf die SD-Karte in den Ordner Firmware kopieren. Da kann man auch noch die FrSky-Receiverfirmwares ablegen.
Es kann passieren (bei älteren Jumper T16 mit 4in1 Version 1.2.x), dass das Modul keinen Bootloader hat. Dann muss man die Funke öffnen und einen USB-Flasher anlöten. Gibt Tutorials dafür.
Zum Glück ist meine T16 so neu, dass das interne Multimodul einfach über SYS->Ordner, Firmware und lange auf die Datei mit Enter klicken->flash internal module geflasht werden kann.
Das wars!
Zuerst ein Backup mit dem Companion-Tool ziehen (Modellspeicher, Firmware).
Die Firmware kann das Companion-Tool auch zusammenstellen. Im SYS-Menü ganz rechts findet man die Informationen zur momentan aufgespielten Fimware. Das kann man alles im Companion auch anklicken und die neue Firmware aufspielen.

T16 in den Bootloader bringen: Die Trimsticks für Quer und Ruder nach innen zur Mitte drücken und dann einschalten. Dann USB anstecken.
Jetzt kann man mit dem Companion die Funke sichern und updaten.

Ich habe festgestellt, dass sich D8, D16, XM+ und X4R-Empfänger alle mit Telemetrie „ON“ binden lassen. Man muss allerdings schnell sein, nach ca. 15 Sekunden beendet die Jumper den Bind-Modus automatisch!
Zu FrSky gehört auch der CC2500-Frequenz-Feinabgleich.
Dazu im Modellspeichermenü unten beim Multi/FrSky den Abgleich editieren und in beide Richtungen die Extreme finden, ab wann die Verbindung abreißt. Beide Werte addieren und durch 2 teilen. Das ist der Mittelwert des Empfängers, den hier einstellen (und es wurde empfohlen, das Modell danach erneut zu binden). Generell sollte der Wert nicht viel schwanken, da die Original-Empfänger kalibriert werden. Muss aber nichts heißen.
Es gibt in der Jumper 62 Protokolle, teilweise mit zig-Subtypen. Jedes Spielzeug hat wohl ein eigenes Protokoll. Da hilft nur, das Spielzeug zu googeln, ob das einer mit dem 4in1 gebunden hat.
Liste von Modellen mit Protokoll hier.
Eachine E011 – Bayang/Bayang
Eachine H8S – Bayang/H8S3D
Eachine E010 – MJXq/E010
Es gibt 2 Modi – den „Low Power“-Mode und den Rangetest.
Der Low-Power-Mode nimmt ca. 5,2dBm raus. Also grob gesagt kommt ein Viertel der Leistung an die Antenne.
Der Rangetest dagegen ist so niedrig, dass ihn das Powermeter nicht richtig erfassen kann. Von -21dBm auf unter -55dBm (da blinkt die Anzeige auch, d.h. ungenau). Aber in diesem Modus kann der Mobula7 immer noch bis ans Ende der Wohnung fliegen. Allerdings mit Low-RSSI-Warnung. Auf Youtube fliegt der Stock-Mobula7 mit FrSky 400m ohne Probleme.
Auch interessant: In diesem Modus kann man mit dem Frequenztuning spielen. Die RSSI sind bei voller Power bei 105 und im Rangetest auf 70. Die Werte blieben konstant. Auch mit einer Änderung der Feinabstimmung (-30 eingemessen, -40, -20 und 0) blieben die Werte ungefähr da (ging auf 69).
Ich habe mittels des ImmersionRC PowerMeters meine Funken verglichen.

Messaufbau:
– ImmersionRC im 2,4GHz-Modus, Peak, dBm mit 2,4GHz-Dipol.
– Prüfling ca. 10cm (Antennen parallel) entfernt, immer an der selben Stelle.

Angetreten sind
– Taranis X9D: -22dBm
– Taranis Q X7: -20dBm
– Jumper T16: -23dBm
– Graupner MZ18: -24dBm
– Spektrum DX9: -25dBm
– Blade MLP4DSM: -37dBm (!)
– ARRMA Car-Funke ATX100: -25dBm
– Absima Car-Funke CR4T: -25dBm
– Spektrum Car-Funke DX2L: -28dBm
– Chinaspielzeug E011: -36dBm (!)
Analyse:
3dBm sind halbe/doppelte Leistung. 6dBm bedeuten doppelte Reichweite. Ich kann nur vergleichen. Aber ich gehe davon aus, dass die großen Marken sich an die vorgeschriebene Sendeleistung halten.
Fazit:
Die Taranis Q X7 gibt am meisten Output.
Danach folgen knapp dahinter X9D, Jumper, Graupner.
Kurz dahinter Spektrum DX9 und die Car-Funken.
Kläglich versagt haben die Chinafunke vom E011 und: Die Spektrum RTF-Funke vom Blade-Heli!