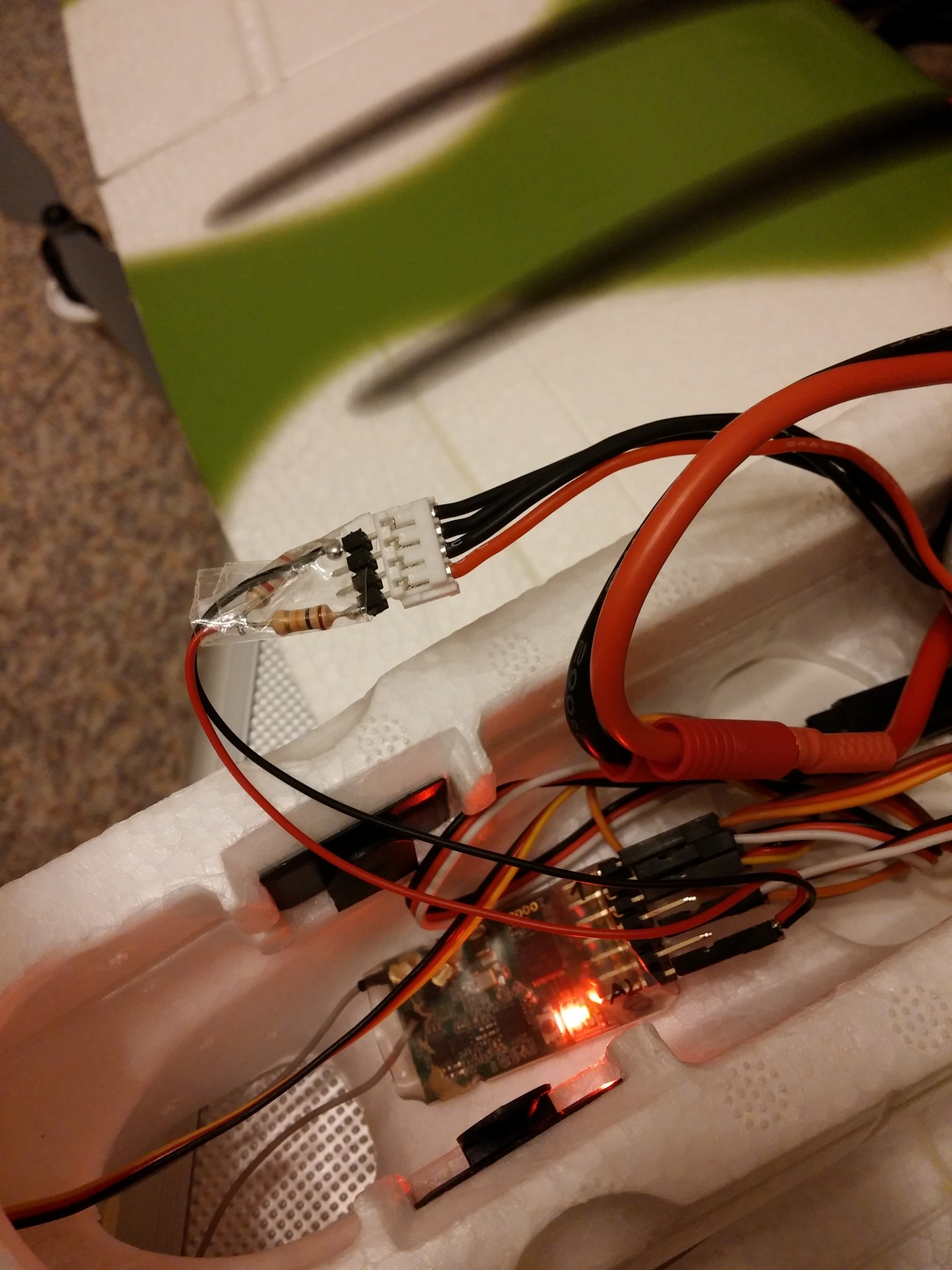
FrSky D6FR mit Telemetrie
Der Akku-Balanceport ist verbunden mit einem Spannungsteiler – so bekomme ich die Spannung mit. RSSI natürlich auch.
Der 6. Kanal ist mit einem Pieper verbunden.
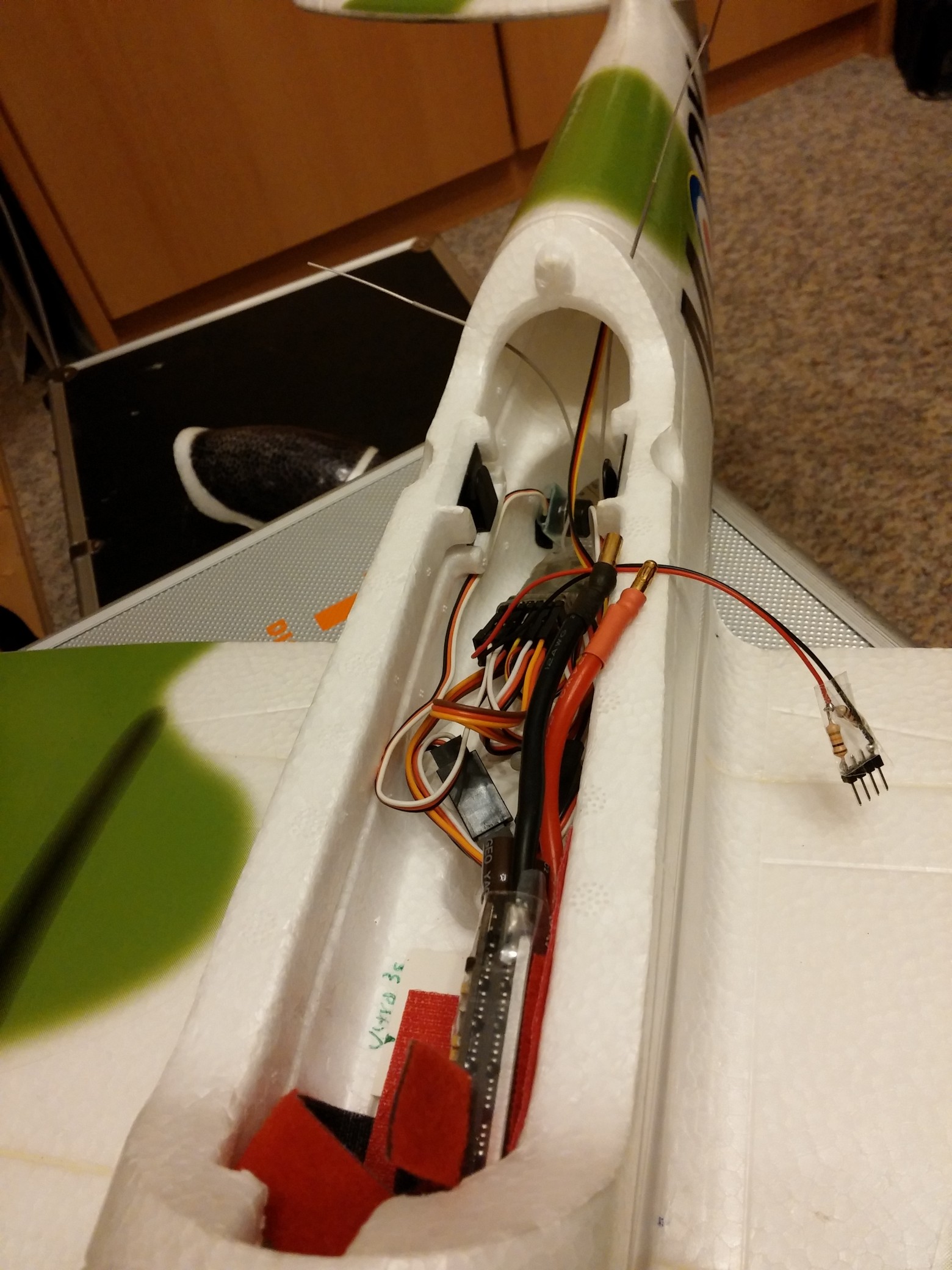
FrSky D6FR mit Telemetrie
Der Akku-Balanceport ist verbunden mit einem Spannungsteiler – so bekomme ich die Spannung mit. RSSI natürlich auch.
Der 6. Kanal ist mit einem Pieper verbunden.


Geht doch!
Die Mobius lag wohl schon eine Woche oder länger auf der Post (die kam aus NL) – hab halt keine Karte gesehen…

Helmut kam später auch dazu – mit seinem Racer.


FPV mit FunCub – das war toll!

So sah der Himmel aus – eine bombastische Stimmung!
https://vimeo.com/141279375

Neuer Controller – flip32+ (der alte CC3D flog extrem zappelig und hatte Störungen auf den Sensoren)
Cleanflight drauf und neu eingestellt
X4R-SB gepatcht (SBUS an Flip32 darf nicht invertieren – daher extra Kabel vor den Inverter dran gelötet)
KISS auf OneShot umgelötet
Piepser gebastelt und angebracht
Fazit: Fliegt jetzt anständig! PuTTY SSH connection timed out


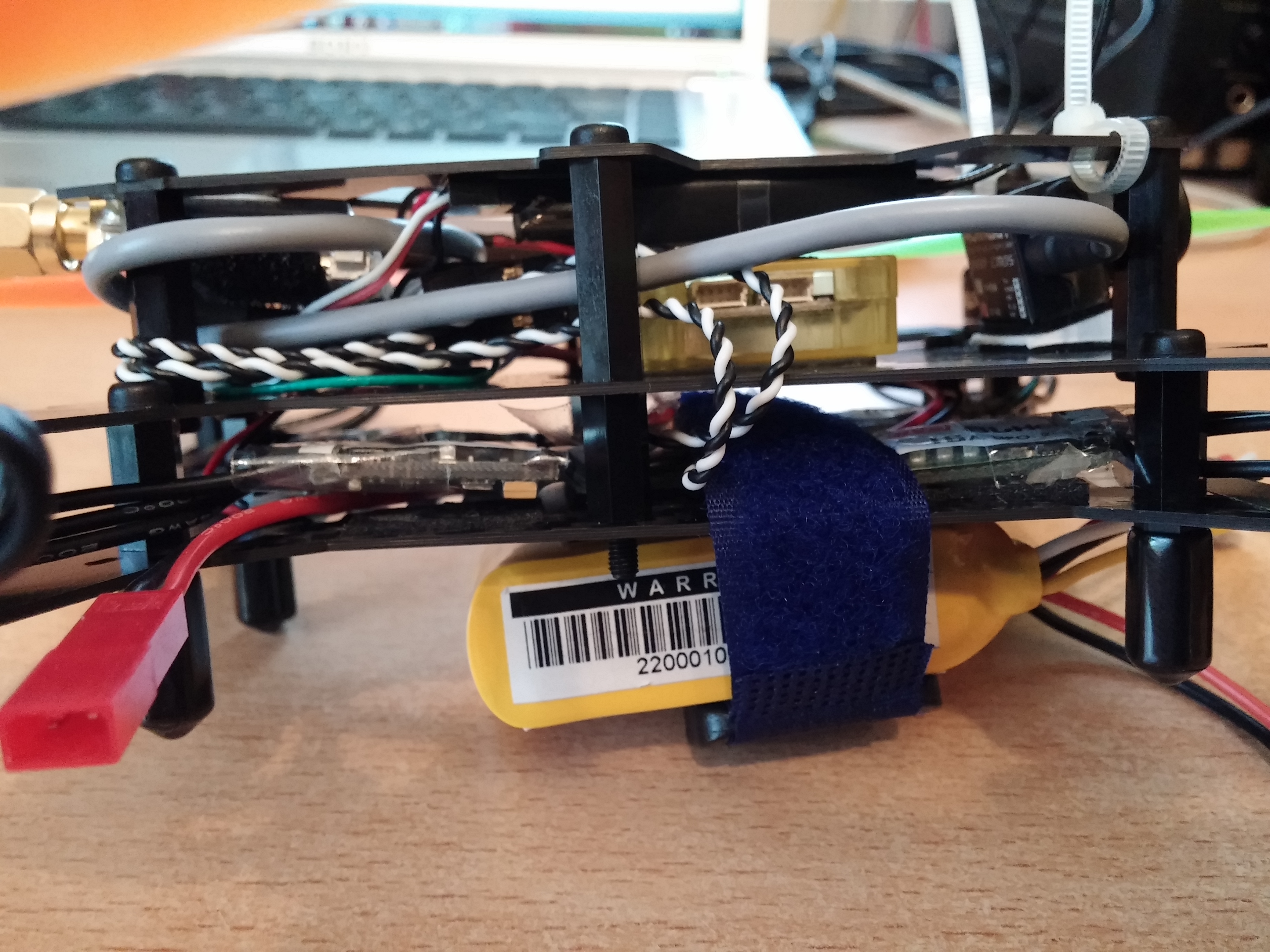

Voll aufgebauter Eachine Q200
175g ohne Akku (Akku 50-90g, 3s)
5A Schwebestrom
Fliegt mit Default PIDs (PID controller MultiWii 2.3) schon richtig gut.
Bauzeit mit anschließendem Einfliegen etwas über 4h

Man nehme:
1x MinimOSD – flashen auf MAVLINK OSD 2.0 (evtl. geht auch Multiwii-OSD oder Rush/KVTeam r345)
Charset upload nicht vergessen!
Anysense – auch hier den zweiten Port auf MAVLINK konfigurieren!
Und dann noch mit dem Tool den OSD Screen nach Gusto einrichten.

USBasp – für AVR flashen, bzw. AVRDRAGON als universelles Atmel-Tool
FTDI (am besten mit Spannungsjumper) – flexibler USB zu seriell Wandler, flasht z.B. FrSky, OpenLRS, etc.
Arduino pro mini – „Schweizer Taschenmesser“, flasht und konfiguriert auch ESCs uvm.
Bluetooth HC-06 – drahtlose serielle Schnittstelle, z.B. zum schnellen Einstellen von PIDs
https://vimeo.com/136017862