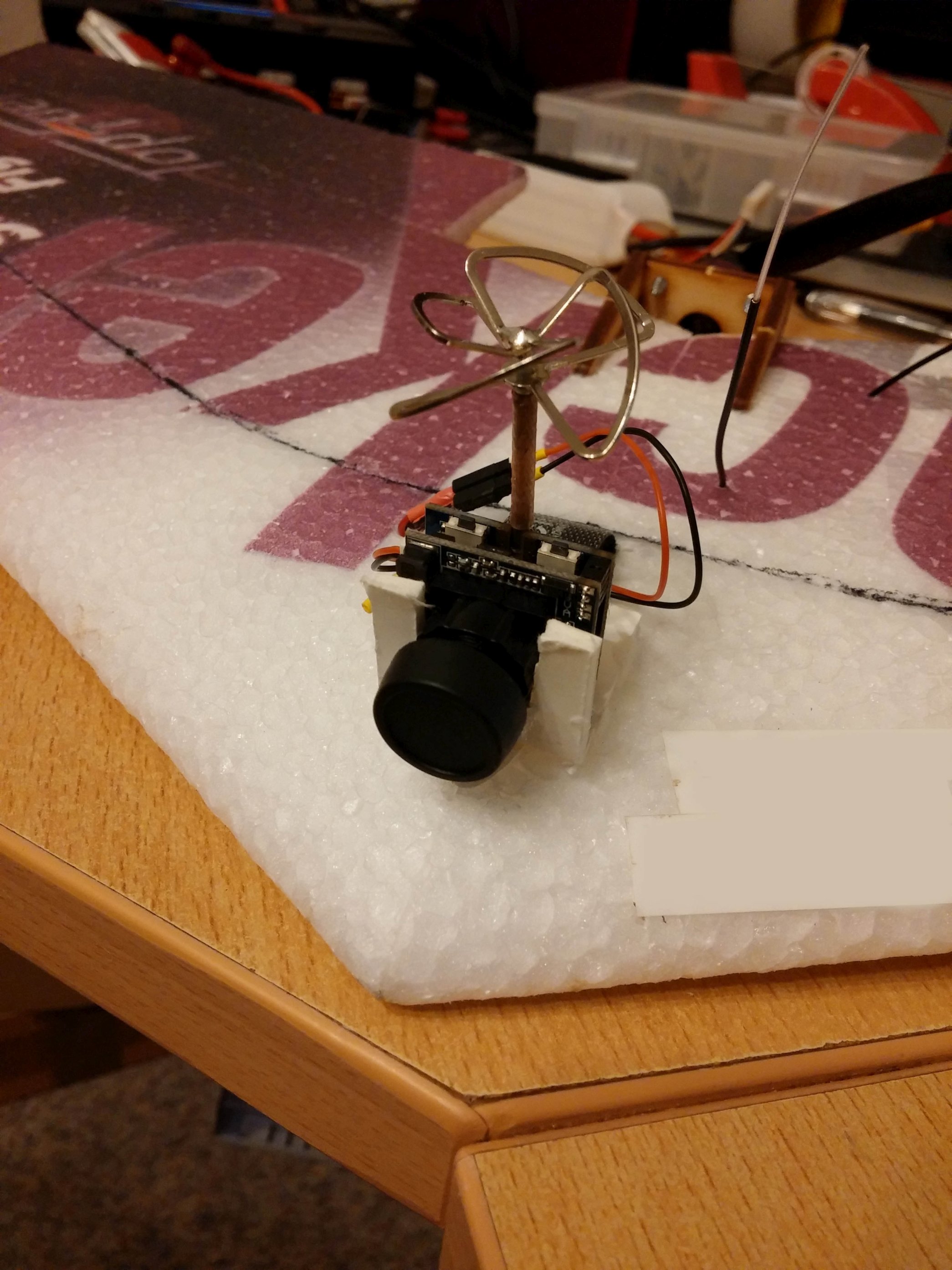
Die neue Kamera muss ja auch irgendwo drauf:
Ob der Skyfighter EVO als FPV-Flieger taugt, muss sich erst zeigen. Er war ja ziemlich zickig am Anfang.
Der Plan ist ja immer noch, dass es eine kleine universelle Videolösung für alle Flieger gibt. (am besten hat der betroffene Flieger einen FrSky-Empfänger…)
- mit allen Kanälen
- leicht
- lebt direkt vom Balancerport oder BEC 5V
- hält per Klett
- nicht zu teuer
- alles integriert (Kamera, VTX und Antenne) – hier kann man auch noch ein OSD einschleifen (mit einem GPS und Spannungsfühler wäre das dann die Komplettausstattung!)
- Bild gut